Hi
I am trying to build a drone for wind turbine inspection.
So I want to use offboard control through raspberry pi as onboard computer. I am writing scripts in mavsdk-python but I’m not getting expected response from drone.
I simulation it works fine.
Any ideas?
Make sure you are sending the same sysid as on your flight controller.
For example, if you are sending a heartbeat you can position yourself here and check what you are receiving:
https://github.com/PX4/PX4-Autopilot/blob/646f711b1a3b700bb55f3eec909ff53c728afe1f/src/modules/mavlink/mavlink_receiver.cpp#L2083
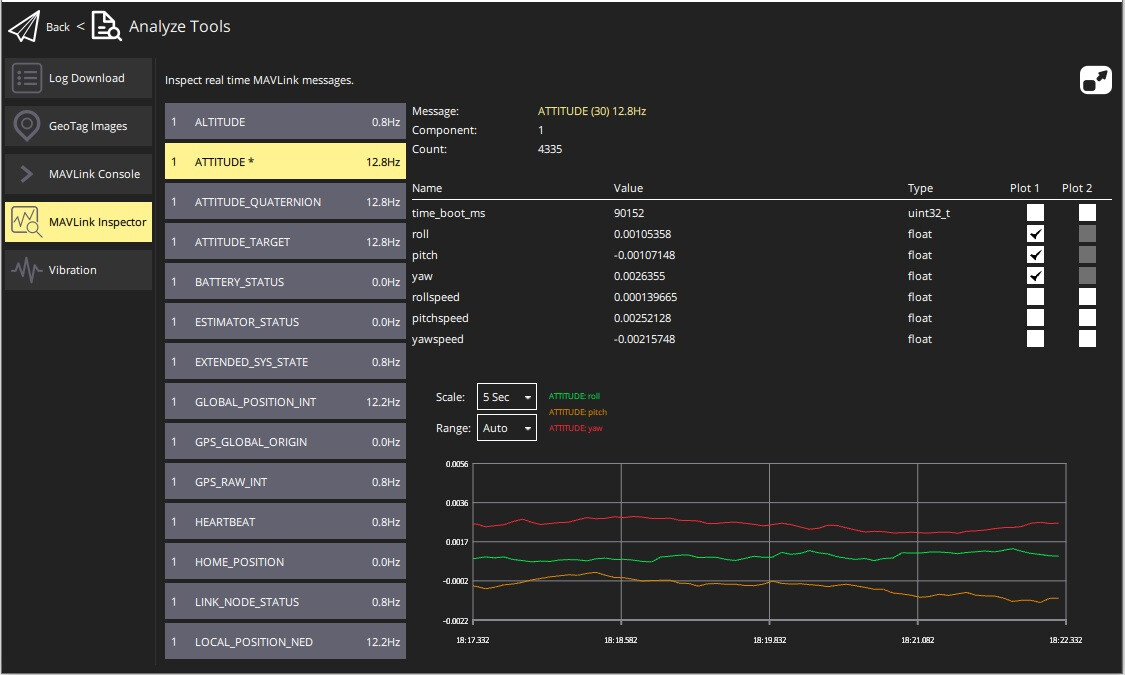
Another thing, you can inspect Mavlink messages directly from QGroundControll like here:
Yeah, I’m pretty sure I’m connected cuz the drone responses. Only while changing the modes from ‘POSCTL’ to ‘OFFBOARD’ it oscillates and then give aggressive movements too.
In that case please share a logfile of when that happens using logs.px4.io.