Hardware: Pixhawk4 (PX4 pro stable release v1.11.0/ px4fmu-v5_default.px4)
Setup: PX4 connected to Jetson TX2, and Holybro telemetry radio 915Mhz connected to ground and px4 for QGC.
And followed most of the steps.
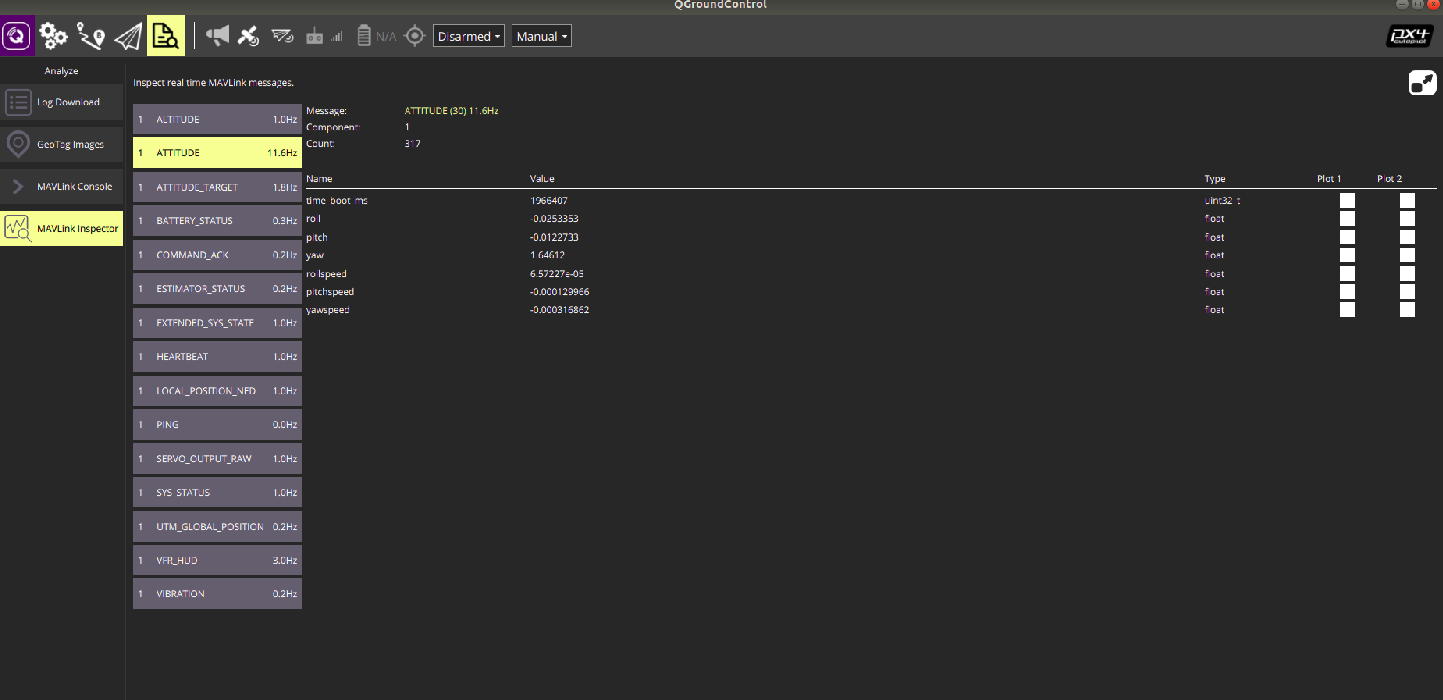
The step where I got stuck was check/verify VIO Estimate, as told in that step I set the MAV_ODOM_LP to 1 and was expecting an ODOMETRY message in the mavlink inspector, but it didn’t found out,
My mavlink inspector output looks the following as shown in the image.
@Isidro_Arias
I tried that too, it still doesn’t show up.
I think there are some commands that are missing in the official tutorial. I tried the below link https://github.com/thien94/vision_to_mavros
and it seems that the odometry shows up in QGC when we publish on /mavros/vision_pose/pose and not on /mavros/odometry/out.
Hi for future reference
Unfortunetly I cannot use the v1.10.1 since the FC that I am using was not yet supported in that version. and trying to support it there doesnt make much sense.
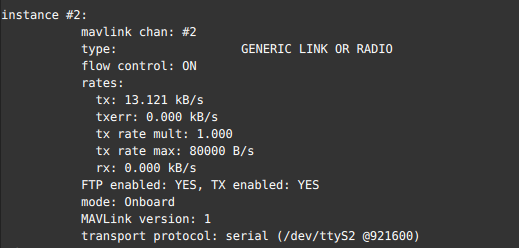
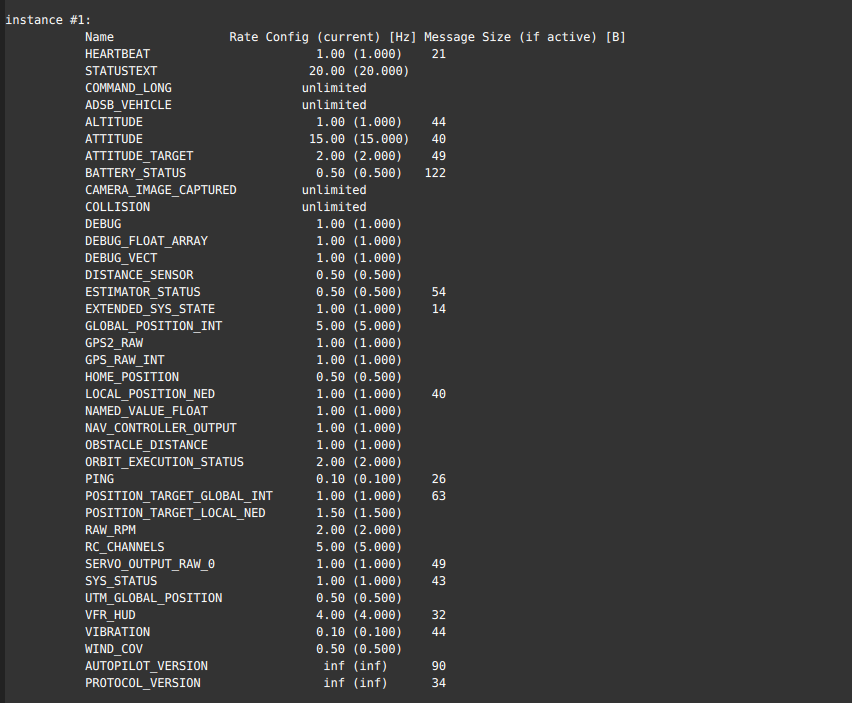
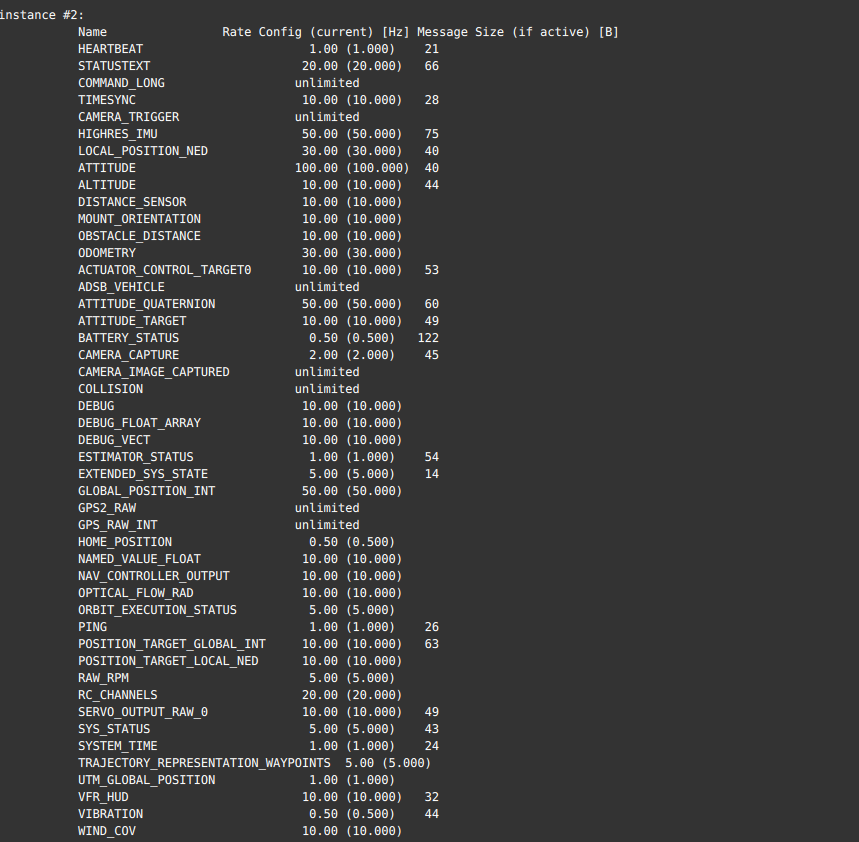
This can also be observed on v1.12.3 . Even though the ODOMETRY message is not being streamed on that mavlink instance the vision is being properly fused.
Running v1.12.3, odometry is not showing up in qgroubndcontrol Mavlink inspector even though MAV_ODOM_LP is set to 1.
In Mavlink Console, uorb top shows there is vehicle_visual_odometry publishing
hi, thanks for the reply. we are indeed using EKF2 to fuse the sensor readings. We would like to see odometry for debugging purpose by comparing the odometry with the local_position which is the fused result by EKF2.