I’m working on a 3-motor VTOL Rotorcraft, two motors forward, with one on tail boom, front two have servos to rotate motors from vertical to forward for FV mode.
I have the rotorcraft/FW mode change working, and tilt motors are set with one being opposite as they are mirrored. When in RC mode, with both motors vertical, and attempt a LEFT YAW with stick, both motors tilt about 10 deg forward; I believe that just the right motor should tilt rather than both. I have no movement of either when commanding right YAW. Using PX4 X6 and Radiomaster Boxer transmitter.
That looks like a mixer/output setup issue — yaw is being sent to both tilt servos instead of just the right one. Double-check your TX isn’t adding mixes, and look at the servo outputs in QGC to see which channel yaw is mapped to. Most likely the mixer needs tweaking so only the right tilt servo gets yaw input.
I’ll take a look at the Tx mixer, yaw does seem to be mapped to correct channel in QGC, and I do see proper movements on Radio Tab, but no movement on the servo.
If the Radio tab shows correct yaw input but the servo isn’t moving, then the issue is downstream of RC input — likely in the airframe mixer or control allocation. Check the actuator outputs tab in QGC: if yaw isn’t showing there, it’s mapping; if it is, then it’s a mixer/servo config problem.
In Actuator tab, I get yaw with correct mappings. In Airplane mode, both v-tail ruddervators work normally for pitch/yaw. In moving between rotorcraft and airplane, the motor tilt servos work as desired so we know servos do work, and Yaw inputs from RC seem to be passed. The issue seems to be constrained to Rotorcraft mode in one yaw direction only.
Hi Jack, if we look to work a mixer/servo problem downstream of the RC, where would we look? I haven’t seen anywhere in the QGC UI, so I assume we need to dig through the code?
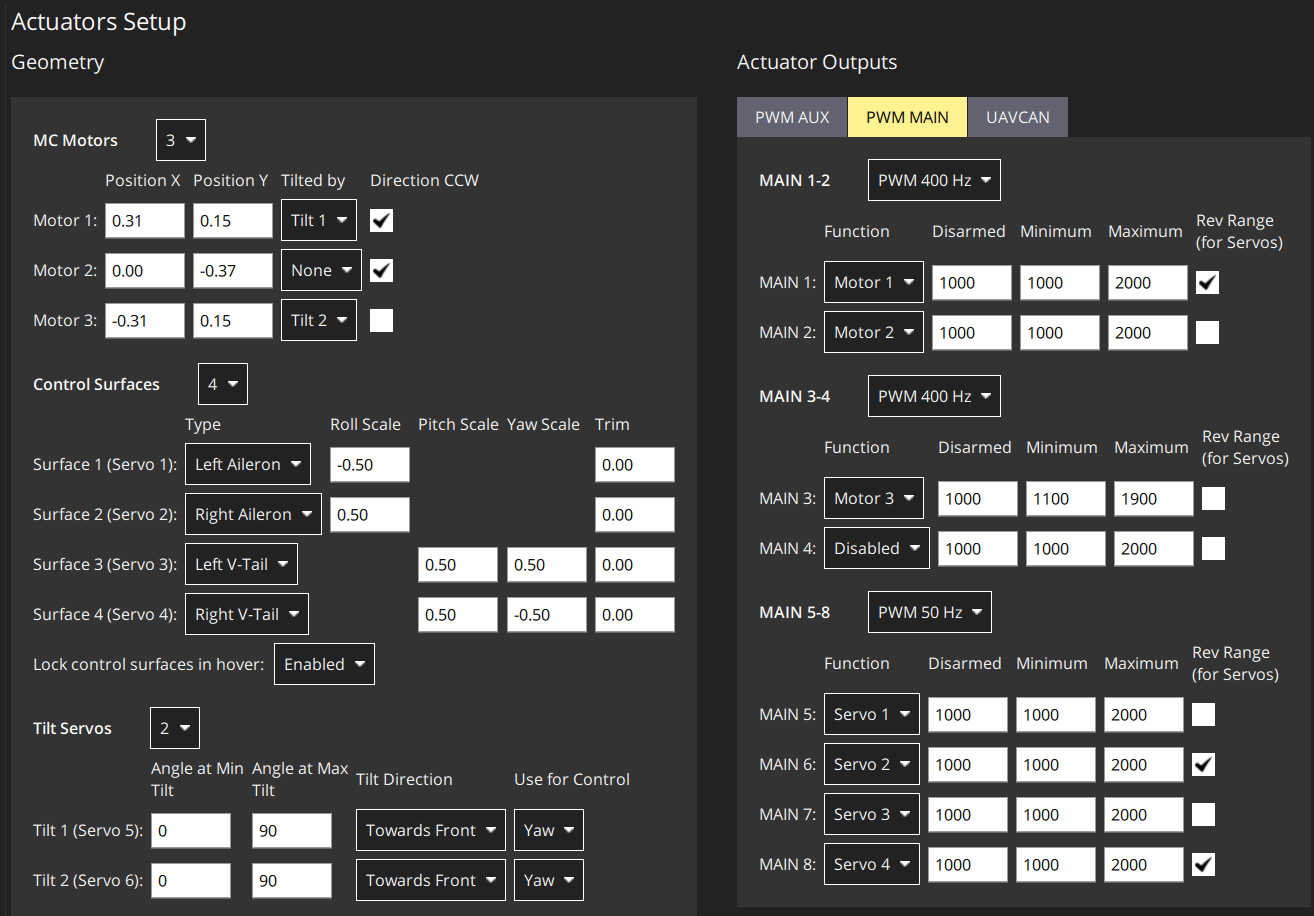
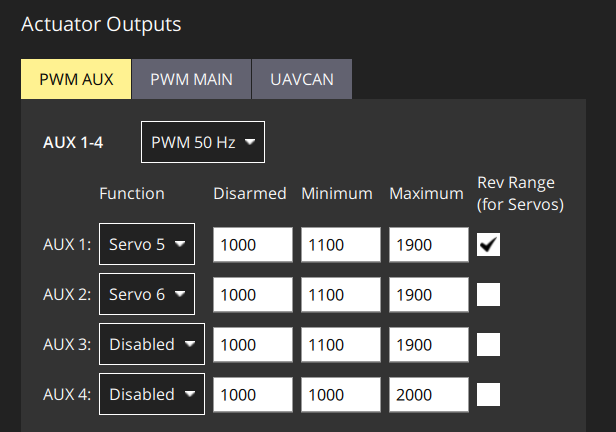
Here’s the current layout for Actuators. Note that we have the Tilt servos mapped as AUX1 and AUX2 (not seen on this tab):
If yaw input shows up in the Radio tab but not at the AUX outputs, then the Control Allocation isn’t mapping yaw to the tilt servos.
In QGC UI you can configure this under Actuators → Control Surfaces / Tilt Servos, but if it still doesn’t respond, the next step is to check the Control Allocation code.
For tilt-rotor setups, yaw is handled in ActuatorEffectivenessTilt.cpp under the PX4 source (src/modules/control_allocator/). If that module doesn’t implement yaw contribution for your tilt configuration, then assigning “Yaw” in QGC won’t have any effect.
So the downstream place to look is the Control Allocation / ActuatorEffectiveness implementation, not only the UI.
Sorry for the long-time resurection of this thread, but for Tilt-rotor yaw, is that achieved by tilt in PX4, or is that still handled by rotor RPM as it is in other quad systems?
Apologize for lengthy time on this thread, but can anyone address the last comment? For a PX4 3-morot VTOL tilt rotor, is yaw accomplished by torque differences while motors are in vertical position, or is that accomplished via tilt of the forward motors?