Hi there,
Currently in mpu6000.cpp in measure().
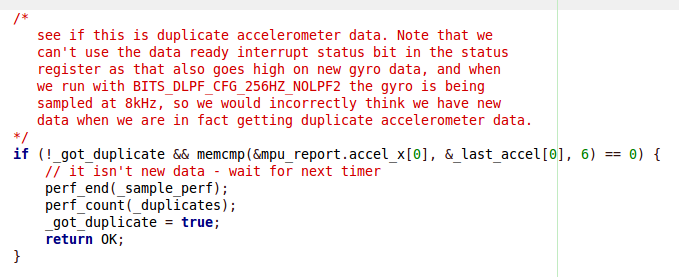
Why does we check for duplicate accelerometer data and not gyro duplicate data too ?
The comment is explaining that we can’t just check the data ready bit interput from mpu6000 sensor because it is a flag that goes for new accel data as well as gyro. But it don’t explain why we don’t check to for gyro duplicate data, right ?
Have I missunderstand something ? Is this because the gyro is updating the data faster than the timer interruption ? Isn’t it strange ?
Here is the call from the high resolution timer (T=1000 tick)
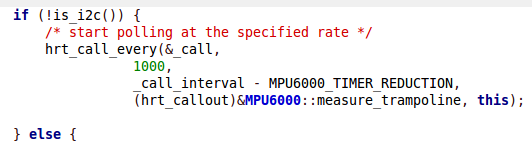
And the mpu6000 gyro sensor according to the comment is 8Khz > 125us > 8 ticks
as one tick is 1ms :
![]()
with
# define PX4_TICKS_PER_SEC 1000L
So if I sum up : The timer wakes up every 1000 ticks (1s) and the gyro update every 8 ticks (125us). isn’t it to slow ?