I have a hexarotor and used flight termination along with attitude failure detection for my test flights. A slight problem I always had with this, is that after flight termination, the motors kept spinning at a very low speed, even below the set minimum level (see video below). I have the following PWM values for my motors:
Disarmed: 1000
Minimum: 1100
Maximum: 1900
So far I tried a few things, like different failsafe values for the motors. But even values of 900, 0 or even -1 (so disabled) don’t resolve the problem. Has anybody experienced similar behavior or knows how to resolve it?
I wonder if this is a Oneshot specific problem, or general. Have you tried with PWM? If it works correctly with PWM, then we have to have a closer look at the oneshot driver. And is this on FMU or IO ports?
I haven’t ried with PWM yet, but I will do so as soon as I can.
Motors are connected to the I/O ports, because I’m using some of the Aux passthrough channels from the FMU.
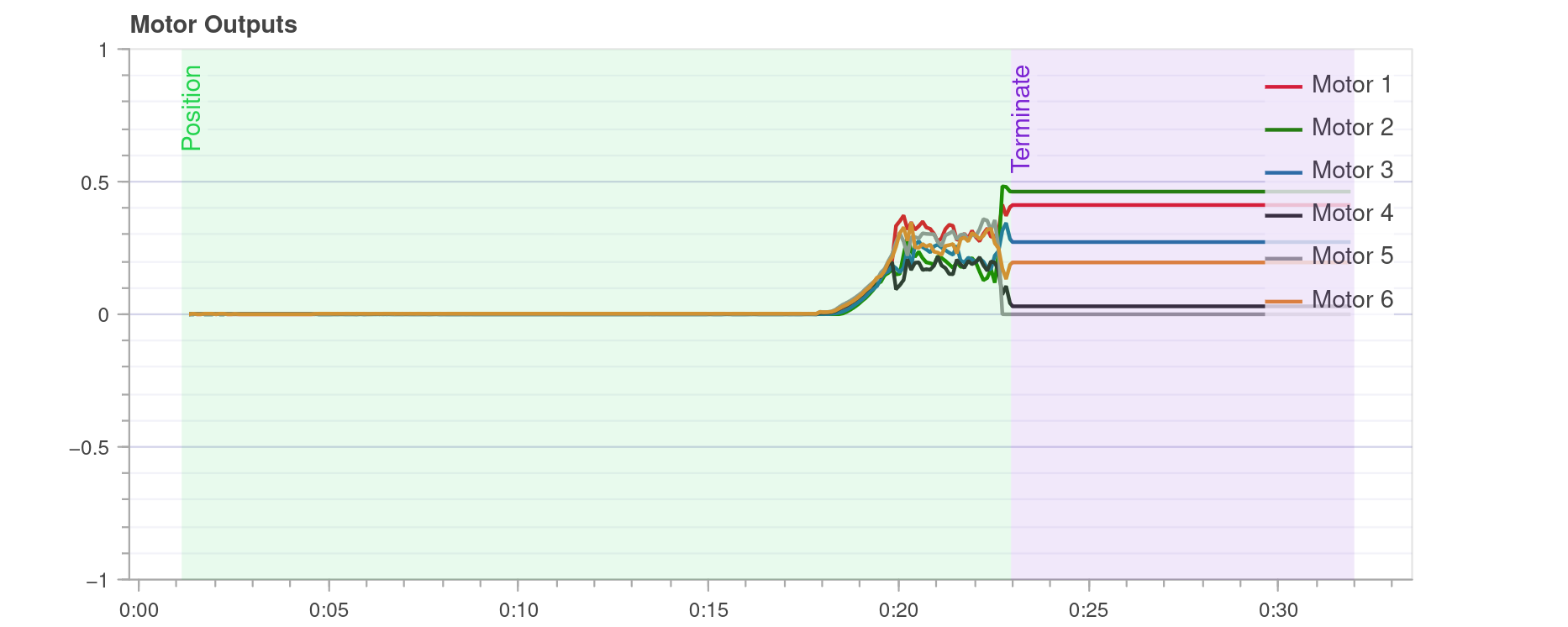
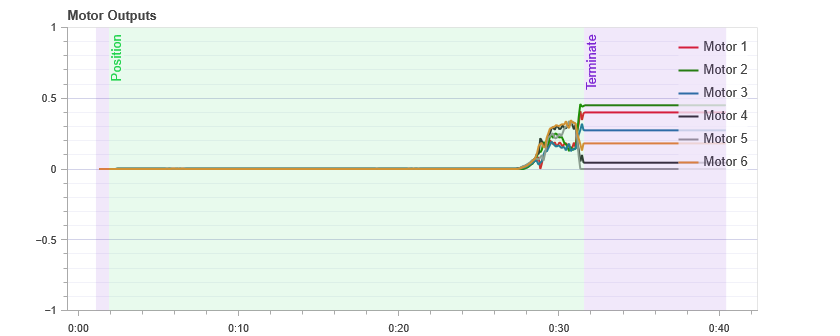
@JulianOes I just had some time to do a test with PWM 400 Hz. The motors fully stopped as I’d expect them to. Surprisingly, to me, the motor outputs in flight review don’t go to zero as well:
Another thing I observed during previous tests, which might be useful, is that if I activate the kill switch and attitude failure triggers after that, the motors spin like in the video. So the failsafe overrides the kill switch in that case.
That’s with OneShot. I didn’t test this behaviour for PWM, but since normal flight term seems to behave properly with it, I expect it to also work in that case.
I juest tested the AUX (FMU) outputs and the motors fully stop for all modes (tested PWM 400 Hz, OneShot and DShot150). So this problem seems to only occur with OneShot on the Main (I/O) outputs.