Have you solved this problem by any chance?
My goal is to break it down. To be more specific, my goal is to move the drone to the desired setpoint and stop one motor in real time or control the speed.
But I thought it was impossible to control the px4 code because I’m a ros beginner.
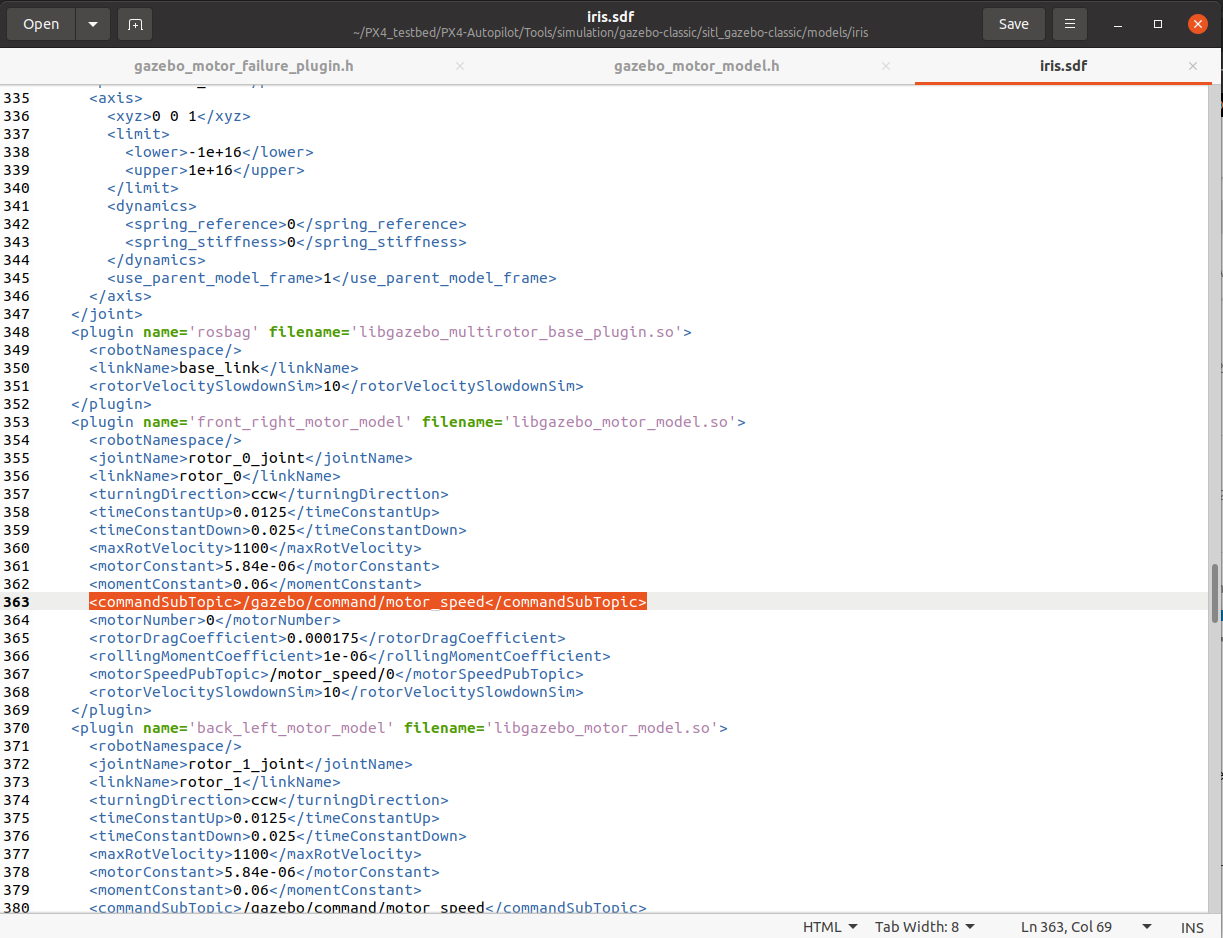
I was looking for a way, and if I look at iris.sdf
/gazebo/command/motor_speed
/motor_speed/0
There’s a code called that.
So I thought there was something about exchanging these topics and when I looked, I found the gazebo_motor_model.cpp, gazebo_motor_model.h file.
However, I have a question that I can modify these files to control iris in gazebo.
What I thought was that you can control the motor by sub or sub here, and you can use this to control the motor in real time.
I’m wondering if this is right, and if it is, I’d like to know how to do it in detail…