Hey everyone,
i was doing some parsing through PX4 source code and documentation, but can’t seem to make sense of a few features:
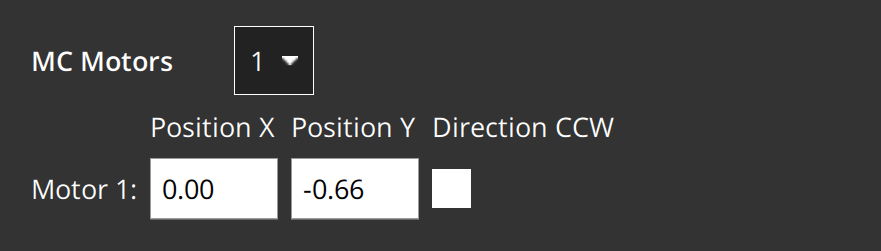
- in Actuators menu there are parameters for the position of the motor. Do they actually affect anything? If so, does anyone know where exactly it is used?
In the source code I only found rotor positions being used in actuators effectiveness directory, but the function that called for rotor positions was just doing a parameter update - hence, I could not find any real math involving position of the motors.
here is what I am referring to:
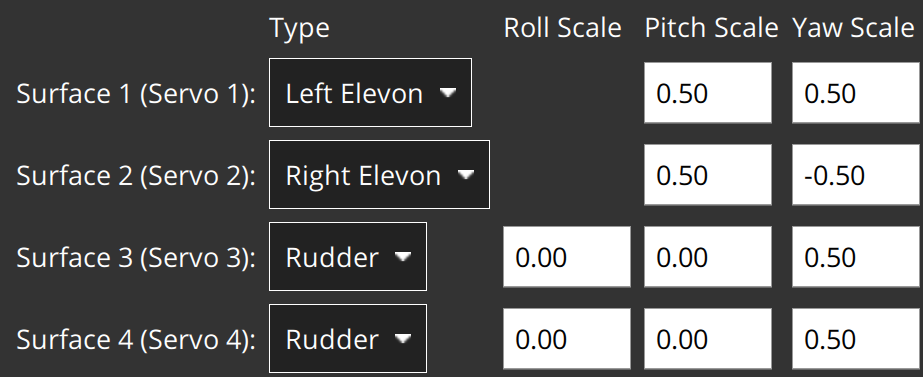
- another question is about the roll, pitch and yaw scaling in actuator’s menu
I read about the topic here: Actuator Configuration and Testing | PX4 Guide (main)
as well as here: Control allocation roll/pitch torque effectiveness actual meaning - #2 by hhenryy
both were rather helpful, but I was wondering what are the recommended default values if any? I ask because when I selected rudders for my servo types, the scales were not automatically adjusted, so I had to wing the number for now.
My confusion comes from the following - effectively these roll, pitch and yaw scales regulate servo’s deflection from roll, pitch and yaw commands, but there are other ways to regulate that. For example adjusting limits in the Radio itself or adjusting pwm range on the output port itself. Which way is best to achieve desired servo response? would especially appreciate inputs from people that flight tested both of these methods