I have a question.
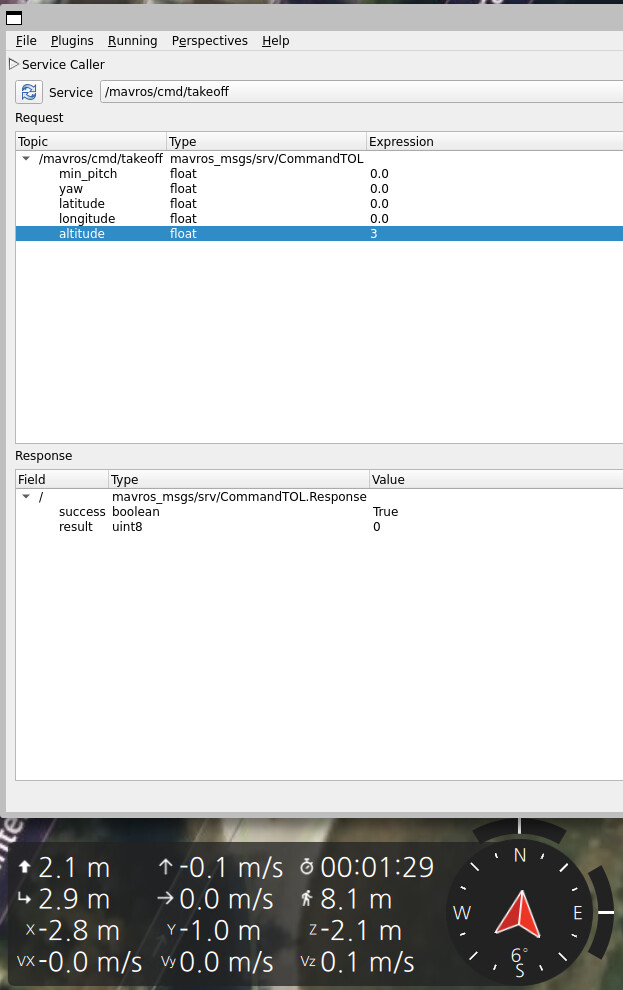
I requested the /mavros/cmd/takeoff service using ROS 2 mavros, and I gave the parameter an altitude of 3m.
The command was executed normally, but the actual take-off altitude was 2m, which was different from the mav_cmd_nav_takeoff command.
I checked it by simulation, but the actual drone is the same.
Why is this difference happening?
I need an accurate explanation.
This topic was automatically closed 90 days after the last reply. New replies are no longer allowed.