Hello,
I am struggling to get the manual_control_setpoint topic to appear in ROS2.
I can confirm that it is present via the command uorb top in the mavlink console as you can see below:
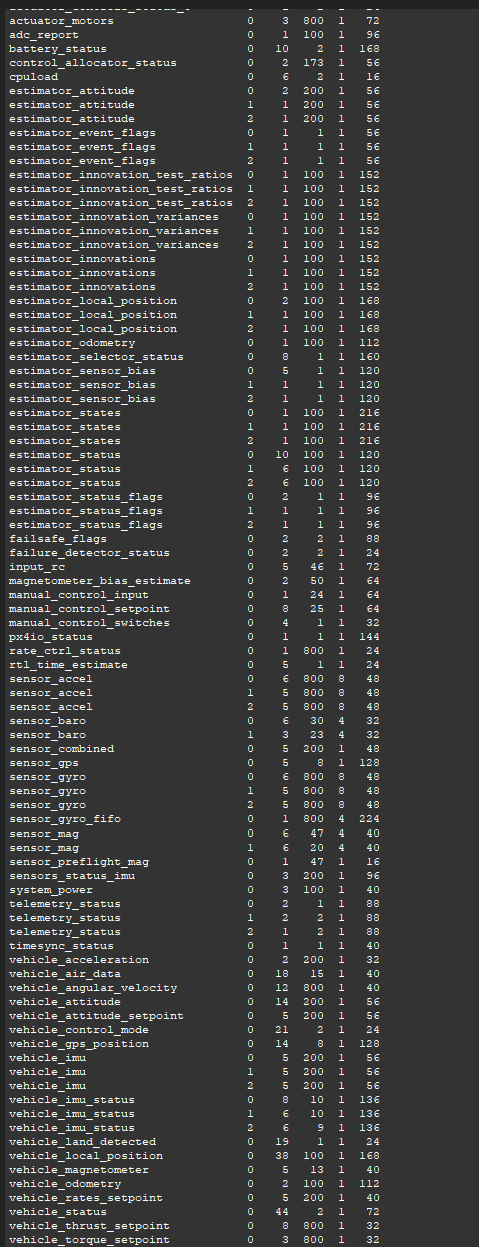
But the topic fmu/out/manual_control_setpoint never appears:

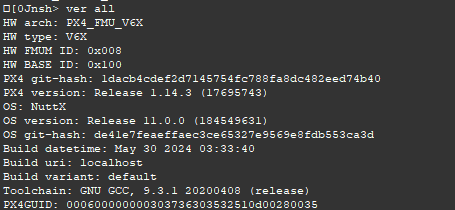
Here is my px4 version information from nuttx:
I am running MicroXRCEAgent udp4 -p 8888 on an NVIDIA Jetson which is connected to my Pixhawk 6X via a Holybro Jetson baseboard. IP addresses are set to static , the Pixhawk IP address is 10.41.10.2 and the Jetson is 10.41.10.1 .
I don’t have issues ros2 topic echo’ing other topics such as fmu/out/sensor_combined its just that manual_control_setpoint doesn’t appear in the list.
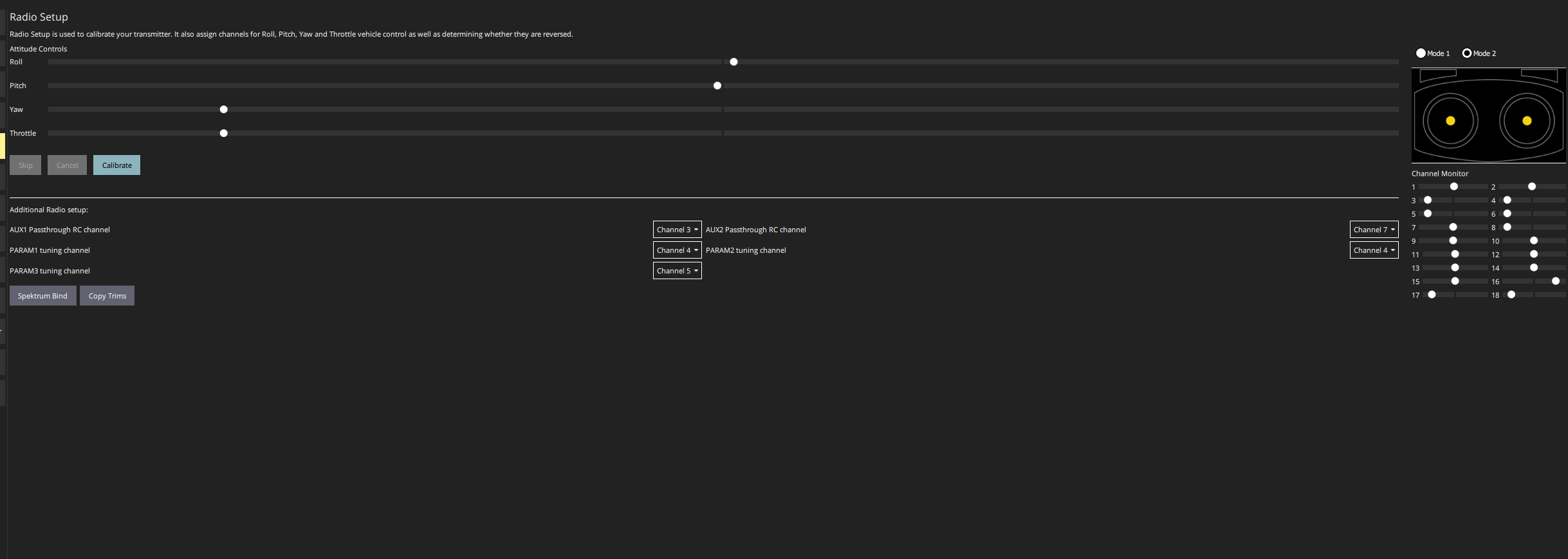
I am using a Radiomaster TX12 remote controller in conjunction with a Radiomaster R81 receiver. I have calibrated the remote controller via QGroundControl and everything looks like its functioning fine in QGroundControl:
Here is me pushing my throttle control all the way down and yaw all the way to the left for reference:
I have also confirmed that the topic doesn’t appear if I get the vehicle to arm. I can put the vehicle in manual and arm it and the topic still does not appear.
I also came across this link in the forum but thought this question should be posted here:
because I can confirm that I see the manual_control_setpoint when I am running SITL in Gazebo , I am only struggling when I try to run on my Jetson baseboard and Pixhawk 6x hardware.
Any ideas on what I should try next? I’d really appreciate any guidance anyone has to offer, I would like to use the manual_control_setpoints to disable my offboard_control application gracefully.
Thanks,
Mike