Hello,
I have some doubts about the bar (green, yellow and red) from the calibration of the magnetometer.
Orientation_confidence of MAG_CAL_REPORT, in the documentation it says that the higher the better but I notice that in Qground there is a bar for that. I wanted to know the thresholds that you have used, and if they adjust with the previous calibration or not.
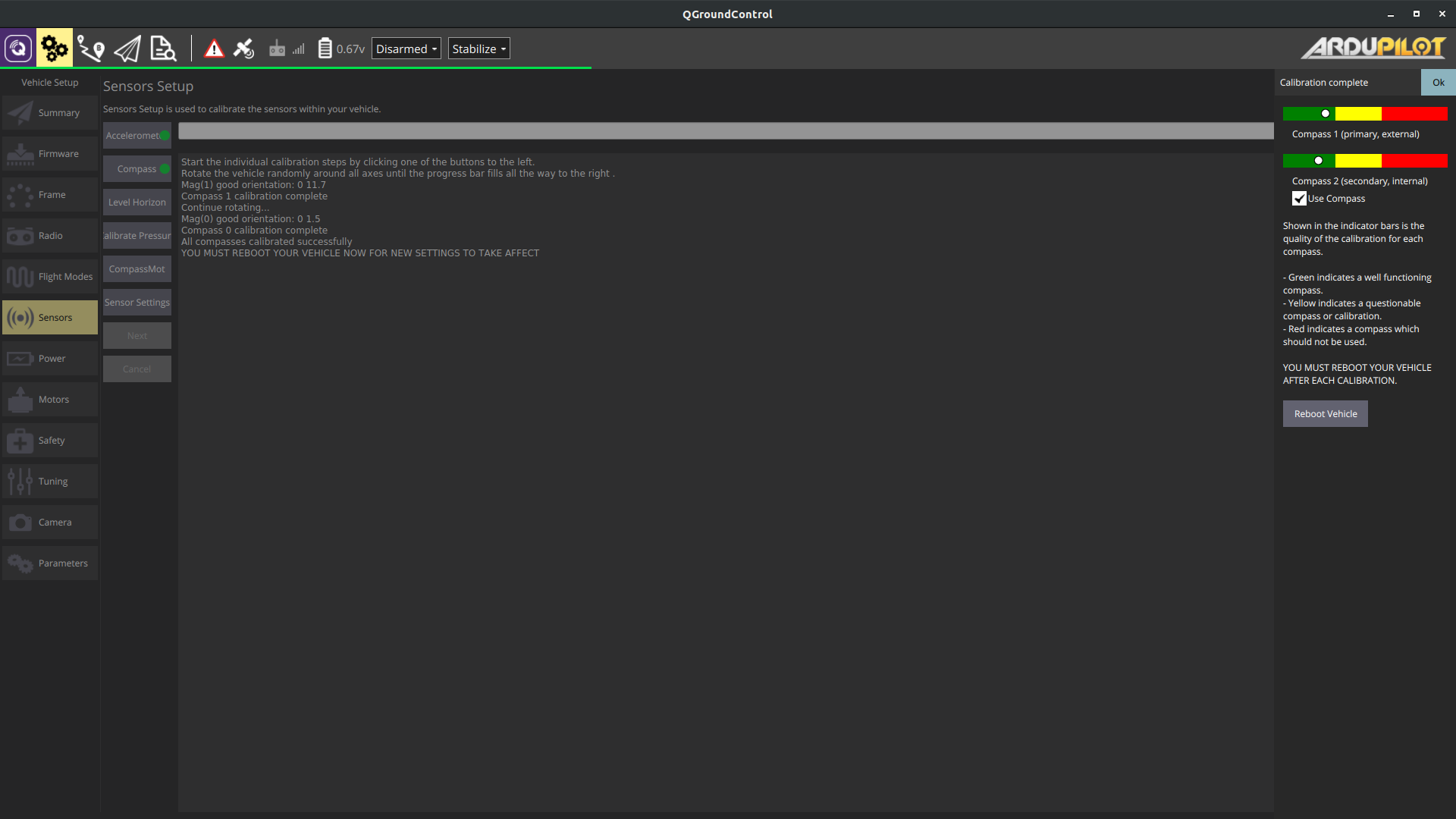
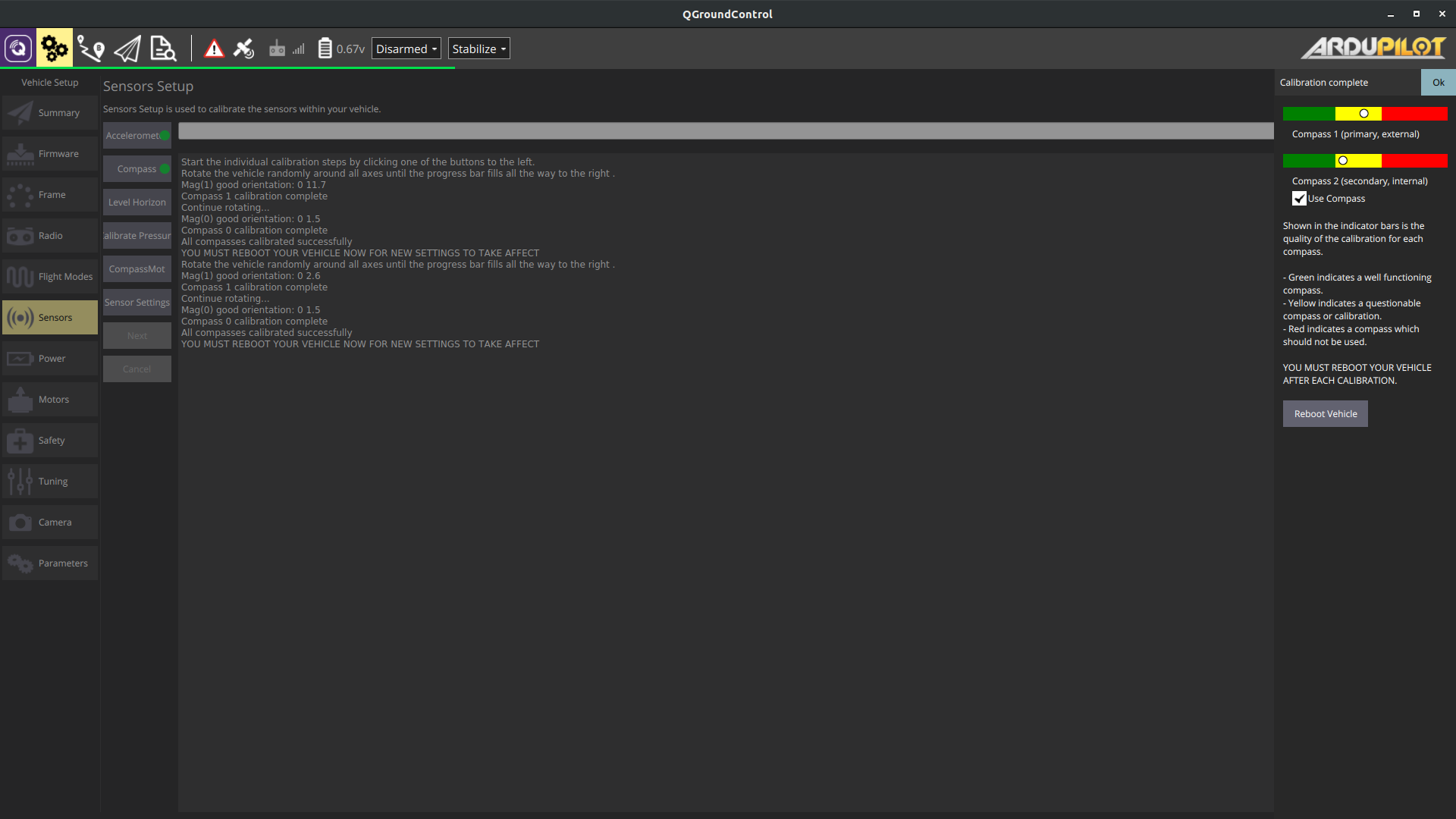
In the attached images I have obtain Mag(1) orientantion confidence of 11.7 and in Mag(0) 1.5. In the second calibration I have obtain Mag(1) 2.6 and Mag(0) 1.5. But the bar of Mag(0) even with the same value transit from green to yellow.
I have tried to find that part on your git but with no sucess, what I manage to find was on ardupilot where is sent a MAV_SEVERITY_CRITICAL if a bad orientation and MAV_SEVERITY_INFO if good orientation. But I still having figure out what is cosidered a good orientation. Because I have obtain values from 1 to 14.
In terms of hardware I have tested with pixhawk 4 and pixhawk cube.