Hi PX4 community,
I’m trying to run PX4 SITL with JSBSim using the hexarotor_x model on Ubuntu 24.04, but I’m facing an issue where the vehicle spawns already high in the air above Zurich airport and I am unable to arm or control it.
Setup
-
OS: Ubuntu 24.04
-
PX4 version: v1.16.0
-
Simulation: JSBSim Version: 1.1.13
-
Model:
hexarotor_x -
Launch command:
make px4_sitl jsbsim_hexarotor_x
Problem description
When I launch the simulation:
- The hexarotor spawns already in the sky above Zurich airport
- The vehicle appears ready to arm, but:
*
I am unable to arm it
*
No proper control response is observed - It does not start from ground level as expected for a normal takeoff scenario
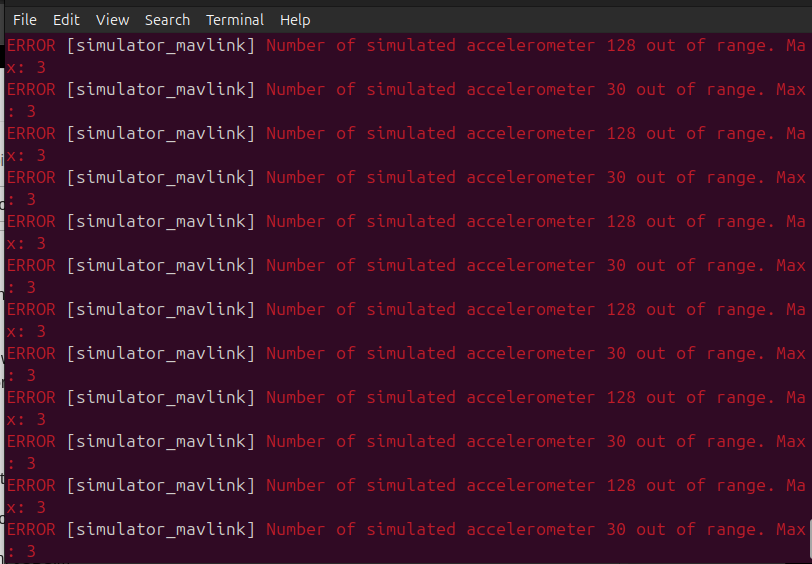
- and the terminal shows this output while running
Expected behavior
- Vehicle should spawn on the ground (or a defined runway/start position)
- Should allow arming and normal manual/autonomous control
- Standard SITL behavior similar to other JSBSim or Gazebo airframes
Actual behavior
- Vehicle spawns mid-air over Zurich airport
- Arming does not work / fails silently or is blocked
- No meaningful control authority over the vehicle
What I tried
- Rebuilding SITL (
make clean+ rebuild) - Re-launching simulation multiple times
- Checking basic JSBSim launch flow
Questions
- Is this a known issue with
jsbsim_hexarotor_xmodel? - Does this airframe require a different startup / launch parameter for ground spawn?
- Could this be related to missing or incorrect:
*
airframe configuration
*
home position initialization
*
JSBSim initial conditions file? - Any recommended fix or workaround to force ground spawn and allow arming?
Additional notes
I am on Ubuntu 24.04, so I also wonder if there are compatibility issues with JSBSim + PX4 SITL on this OS version.
Any help or pointers would be appreciated.
Thanks!