I’m trying to run the gazebo simulation of the avoidance module as described here. The simulation itself works just fine and I see the drone navigating through the trees and finding its goal.
However, there is something wrong and I can’t figure out what causes this problem, why it doesn’t seem to have any influence on the simulation and how to fix it:
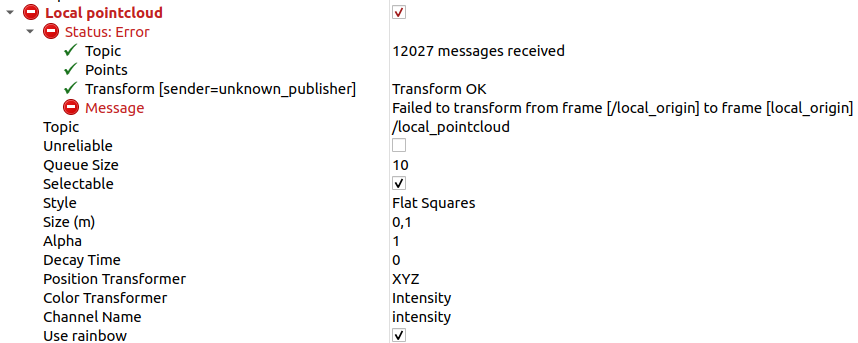
As you can see, in RViz there is an item listet called “Local pointcloud”. This item reports its status as “Error” and tells me, that it "Failed to transform from frame [/local_origin] to frame [local_origin]. To me it seems like this is supposed to be the same frame. I don’t know much about gazebo and RViz and therefore I am struggling to debug this issue. I also can’t understand how the algorithm can work, if it is not able to transform the pointcloud’s coordinates in the local frame.
Any help on this issue would be greatly appreciated.