Does anyone have any inputs of what causes or how to fix this problem?
I have an indoor Quadcopter and am using PX4_autopilot (Pixhawk2 cube black) without GPS.
My quadcopter has a problem that it does not tilt at the same angle even if the same operation value is given. It seems that the change in the output value of the IMU due to temperature drift is related to this problem.
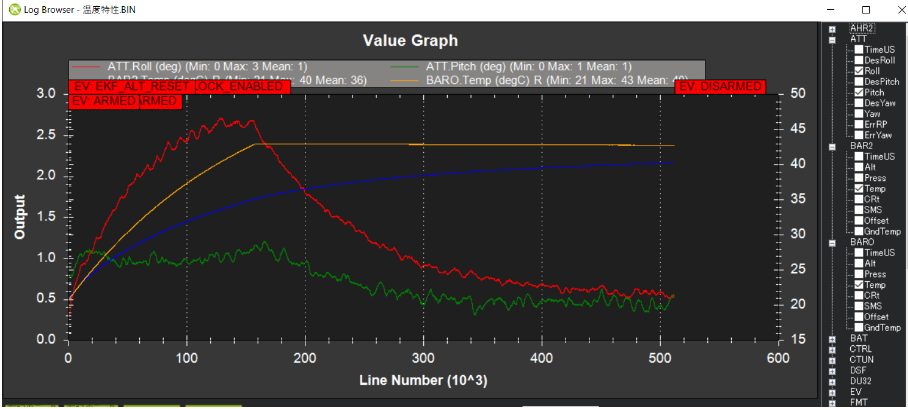
This is the data when the aircraft is left on the flat ground.
What I know now, Pixhawk has a heater so that it can operate even at low temperatures.
Comparing the temperature obtained from the two barometers with the pitch and roll, a change in the value movement occurs when the temperature is kept constant.