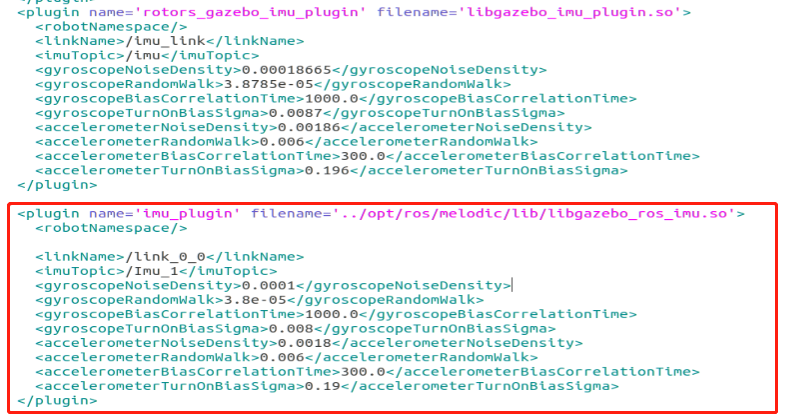
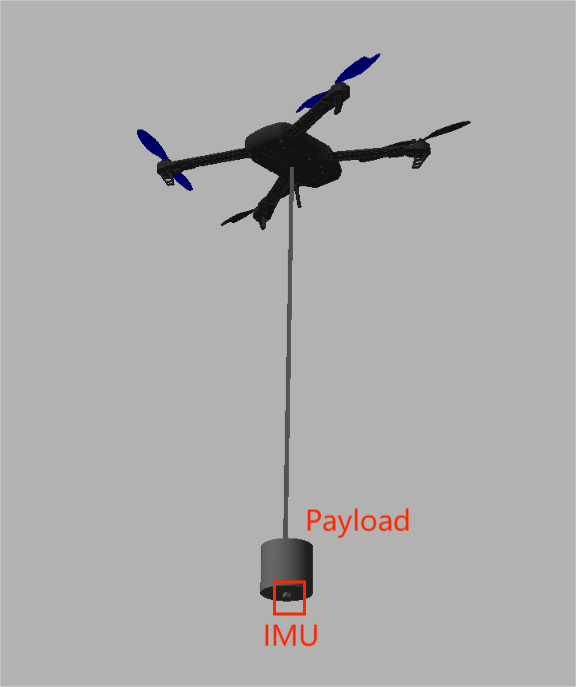
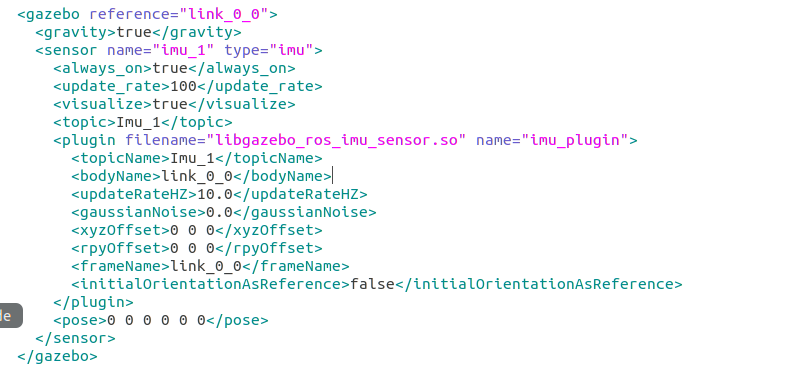
I modified the SDF file, adding the IMU sensor as this:
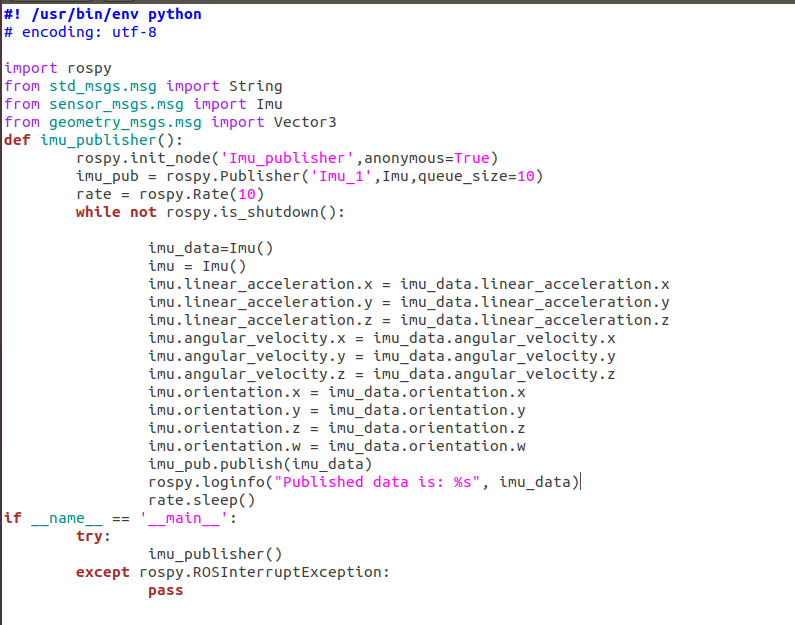
And then I try publishing the IMU data using PYTHON as this:
But when I use
rtopic echo /Imu_1
to show the data, they are all zero as this:
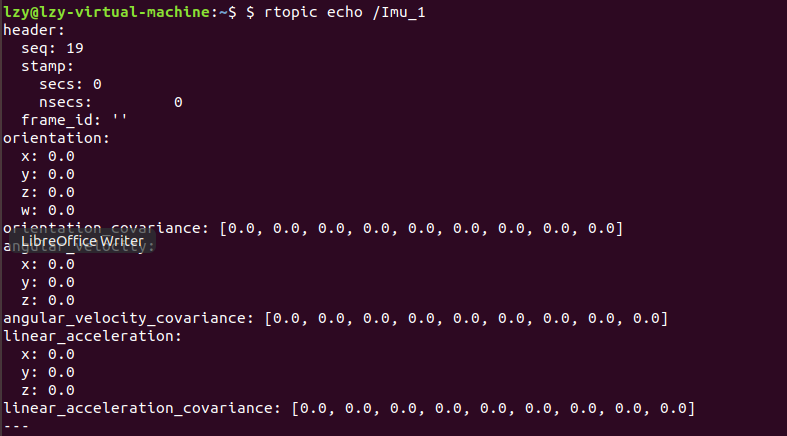
Really can’t solve, need help thanks!
Hello,
I came across your post and am reaching out for some help. I am trying to apply an IMU sensor to an sdf file and obtain data from it, but I’m having a hard time finding resources on how to do this. Could you please share the process you used? Any guidance would be greatly appreciated.
Thank you so much.