Hi all,
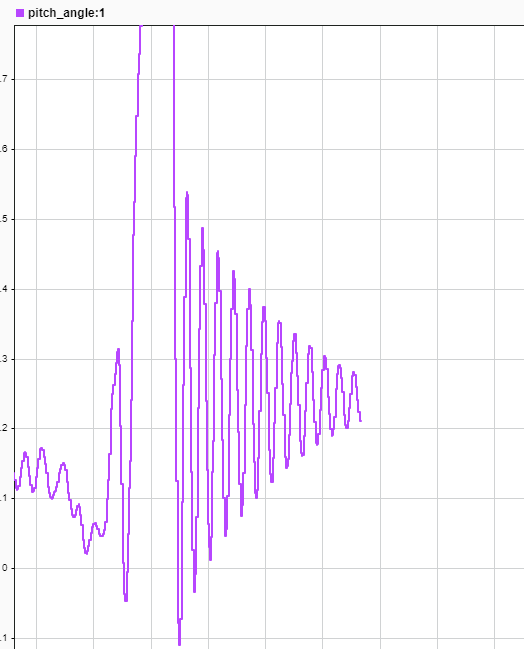
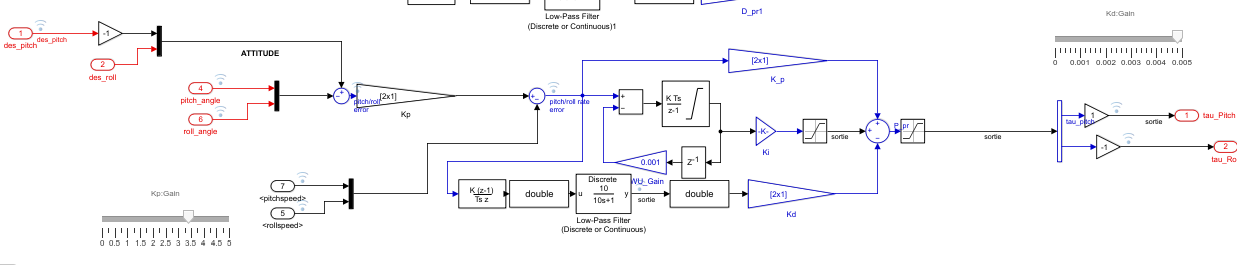
i am currently working on my Master degree to implement an adaptive control Law , so i need to program a control loop for the Pixhawk over simulink, i worked on it for 3 week and i still not have a convincing result , the drone oscillate a the take-off and i don’t know what’s wrong with all my methodology , the pictures here resume the PID loop that i have programmed on simulink maybe someone can help me with this .