Hello, I recently started a drone.
I’m using a PX46C mini. I installed an optical flow/lidar under the drone. (No gps and camera)
At first, the Z-axis value of the drone was so weird. I’m putting the drone on my desk and setting it up, but it doesn’t get zero like in the picture. (Average is about 3m-4m.)
It was measured with a barometer and found out that it was inaccurate.
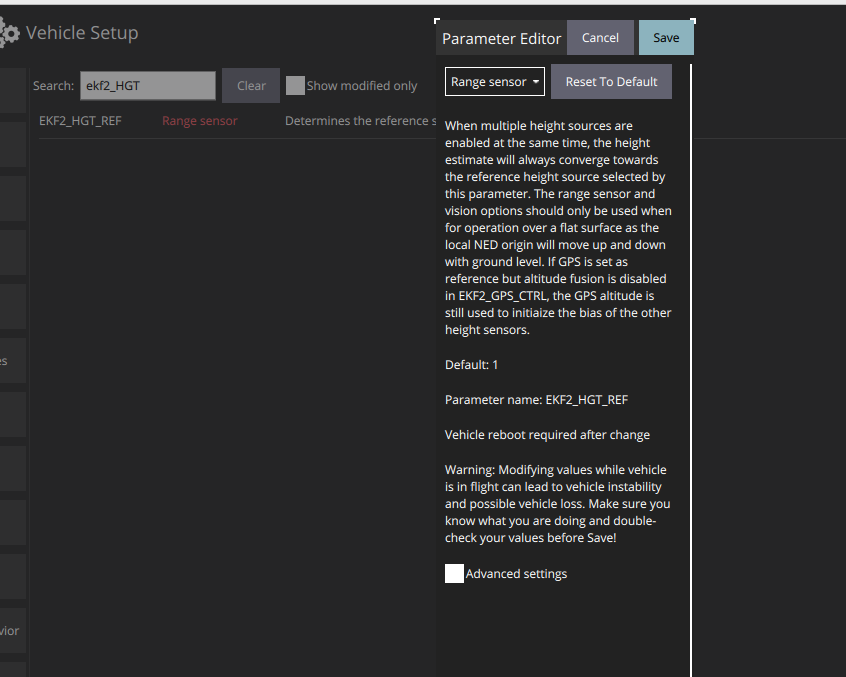
So, I modified EKF2_HGT_REF from GPS to Range sensor as shown in the picture.
I did “ekf2 stop”, “ekf2 start” and then I looked again and the range changed to -0.5 to 0.5 like the picture.
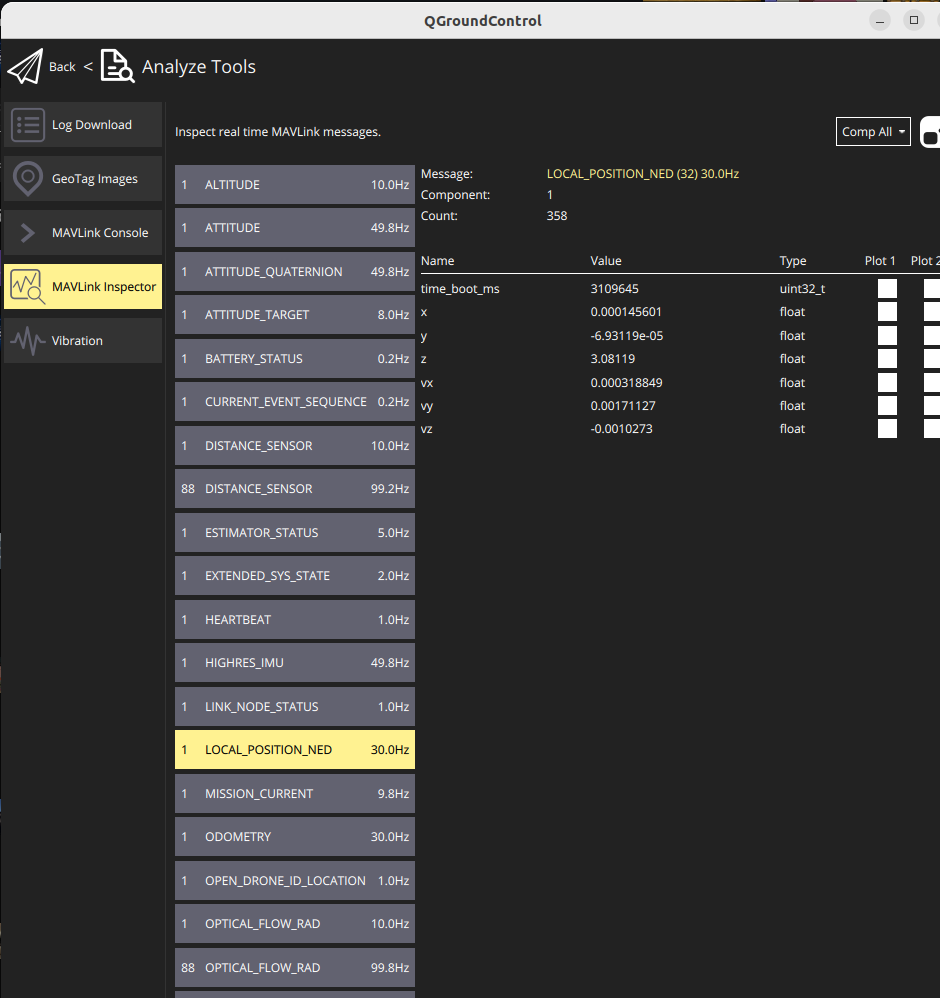
So I moved the drone with LOCAL_POSITION_NED to see if the sensor was working well. But when I moved the drone, the value changed, but when I left it still for a while, it went back to 0,0,0.
I checked the drone information because the drone doesn’t seem to be able to find its current location.
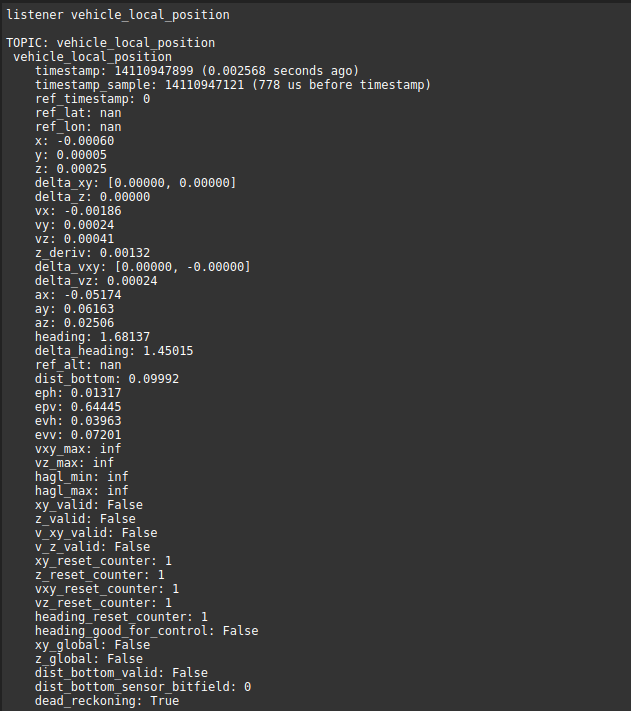
I confirmed dist_bottom_valid: False.
I checked distance_sensor.
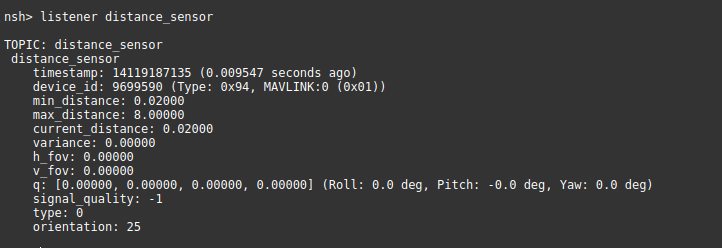
I don’t know why I’m getting False.
Please help me.(Please let me know if you need any more information, I’ll let you know right away.)
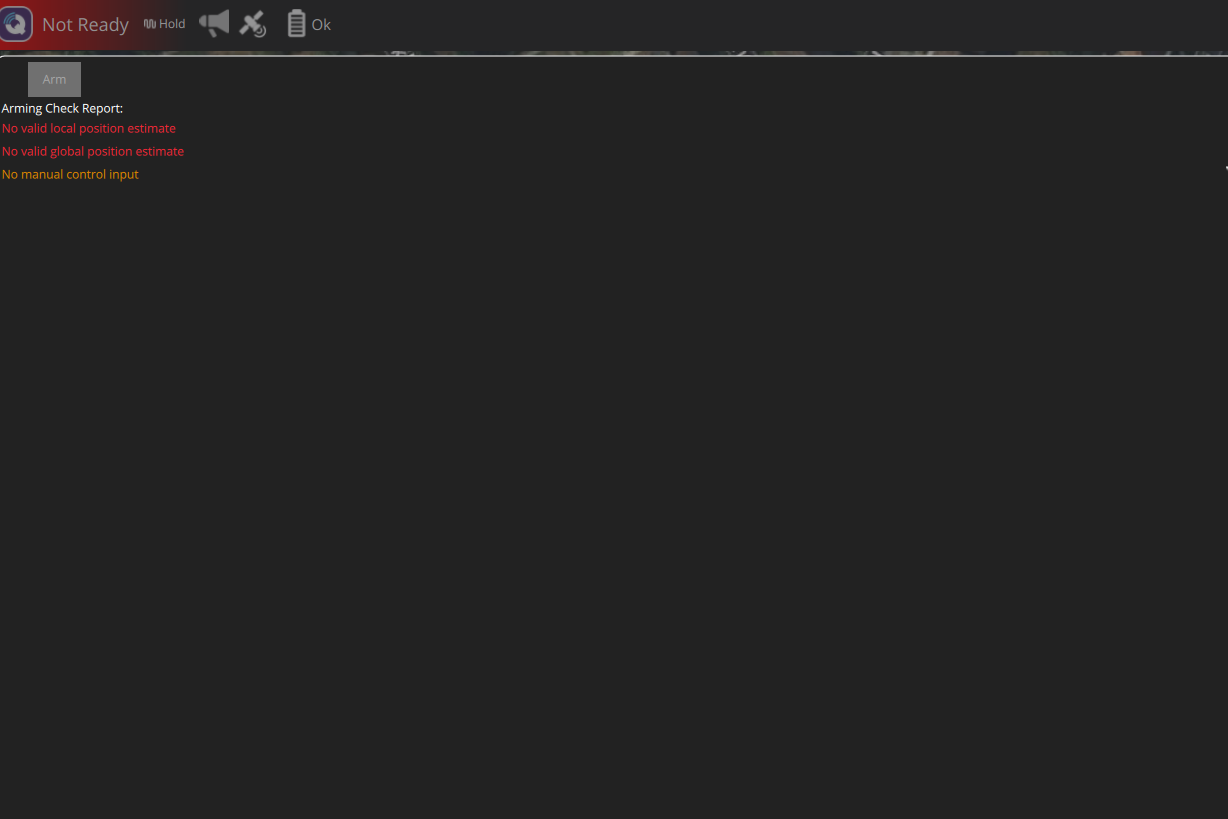
It comes out like this when it’s hold mode in QGC.