Presently is there a way to control the distance sensitivity to a geofence boundary, that is the distance from the aircraft to the geofence boundary before the aircraft stops and wont proceed any further?
Also, to be clear I’m not talking about the geofence failsafe behavior which relates to distance from the home location.
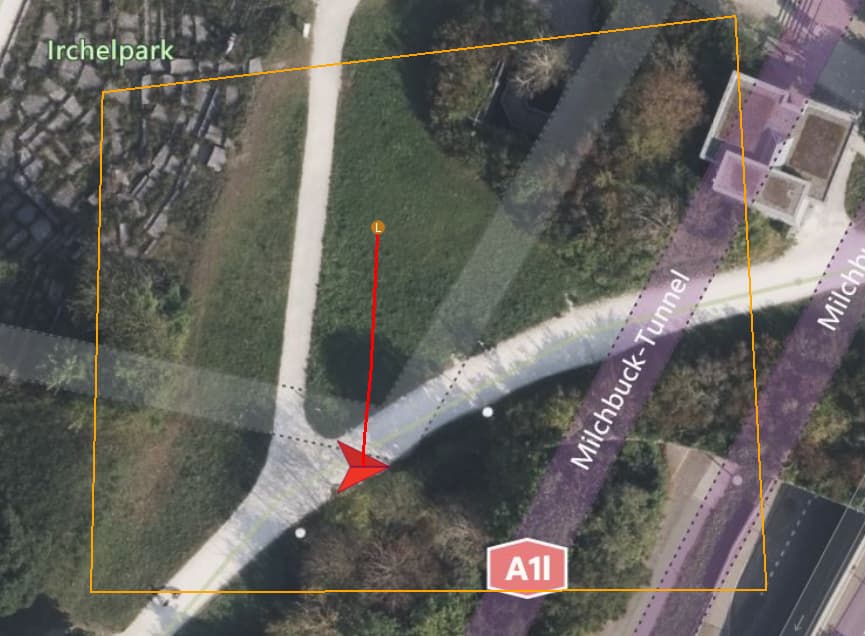
As you can see in the image the aircraft stops well before the boundary.
I havent experimented with the GPS interference in Gazebo plugins yet, how much of a difference would this make?
With minimal GPS noise how close can the aircraft get to the bounds of the geofence?