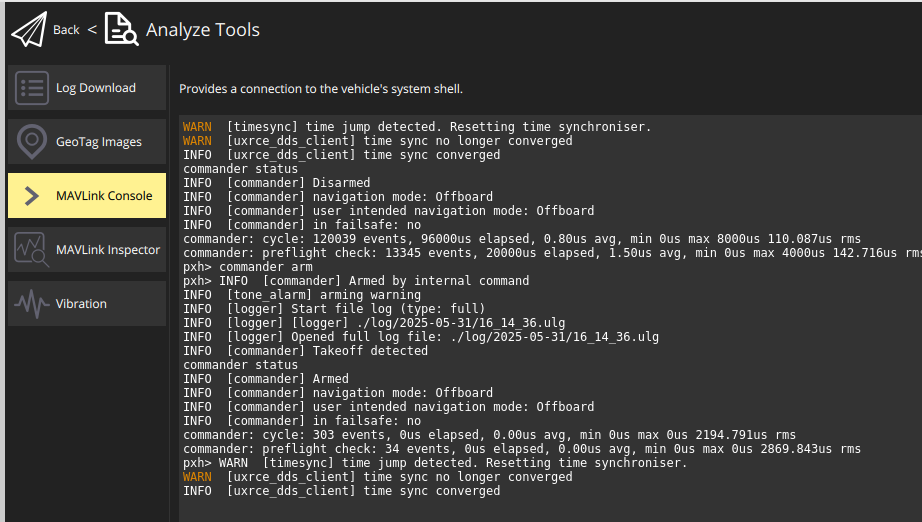
I successfully connected to the PX4 drone using MAVLink and started sending SET_ATTITUDE_TARGET messages. I also armed the drone and set it to OFFBOARD mode (see screenshot below). However, there’s no movement visible in the logs or RViz.
Could you help me diagnose what’s wrong and how to make the drone actually fly?
Environment:
- Ubuntu 22 04
- PX4 1.15
- Python,
pymavlink, ROS 2 - mavlink UDP connection:
127.0.0.1:14540 - QGround station for debug (on picture)

class FlipControlNode(Node):
def __init__(self):
super().__init__('flip_control_node')
self.master = mavutil.mavlink_connection('udp:127.0.0.1:14540')
# send heartbeat to connect with PX4
self.master.mav.heartbeat_send(
mavutil.mavlink.MAV_TYPE_GCS,
mavutil.mavlink.MAV_AUTOPILOT_INVALID,
0, 0, 0
)
self.get_logger().info("Жду heartbeat от PX4...")
self.master.wait_heartbeat()
self.get_logger().info("MAVLink: heartbeat received")
# Arming
self.master.mav.command_long_send(
self.master.target_system,
self.master.target_component,
mavutil.mavlink.MAV_CMD_COMPONENT_ARM_DISARM,
0,
1, 0, 0, 0, 0, 0, 0)
time.sleep(1.0)
if self.arming_state != VehicleStatus.ARMING_STATE_ARMED:
self.arm()
# Turn OFFBOARD
self.master.mav.set_mode_send(
self.master.target_system,
mavutil.mavlink.MAV_MODE_FLAG_CUSTOM_MODE_ENABLED,
VehicleStatus.NAVIGATION_STATE_OFFBOARD)
time.sleep(0.1)
# Timer 10 Gz
self.create_timer(0.1, self.send_pwm_loop)
def send_pwm_loop(self):
if not rclpy.ok():
return
level_quat = [1.0, 0.0, 0.0, 0.0] # без наклона
type_mask = (
mavutil.mavlink.ATTITUDE_TARGET_TYPEMASK_BODY_ROLL_RATE_IGNORE |
mavutil.mavlink.ATTITUDE_TARGET_TYPEMASK_BODY_PITCH_RATE_IGNORE |
mavutil.mavlink.ATTITUDE_TARGET_TYPEMASK_BODY_YAW_RATE_IGNORE
)
self.get_logger().info(f"type_mask: {type_mask}") # 0b00000111 = 7
self.master.mav.set_attitude_target_send(
int(self.master.time_since('BOOT') * 1e3),
self.master.target_system,
self.master.target_component,
type_mask,
level_quat,
0.0, 0.0, 0.0,
0.7
)