I found the cause but there is a strange problem. Go to
/src/PX4-Autopilot/launch/mavros_posix_sitl.launch file and you will this line of code that directs you to /usr/share/mavlink_sitl_gazebo
<arg name="vehicle" default="standard_vtol"/>
<arg name="world" default="$(find mavlink_sitl_gazebo)/worlds/empty.world"/>
<arg name="sdf" default="$(find mavlink_sitl_gazebo)/models/$(arg vehicle)/$(arg vehicle).sdf"/>
Although my defined path in “bashrc” is linked to “/src/sitl_gazebo” as plugin, models, resource path etc, why PX4 forces me to use mavlink_sitl_gazebo??? which it is kind of hard to change many things in PX4 while using ROS and Gazebo (but these are much easier to achieve in Ardupilot ROS Gazebo).
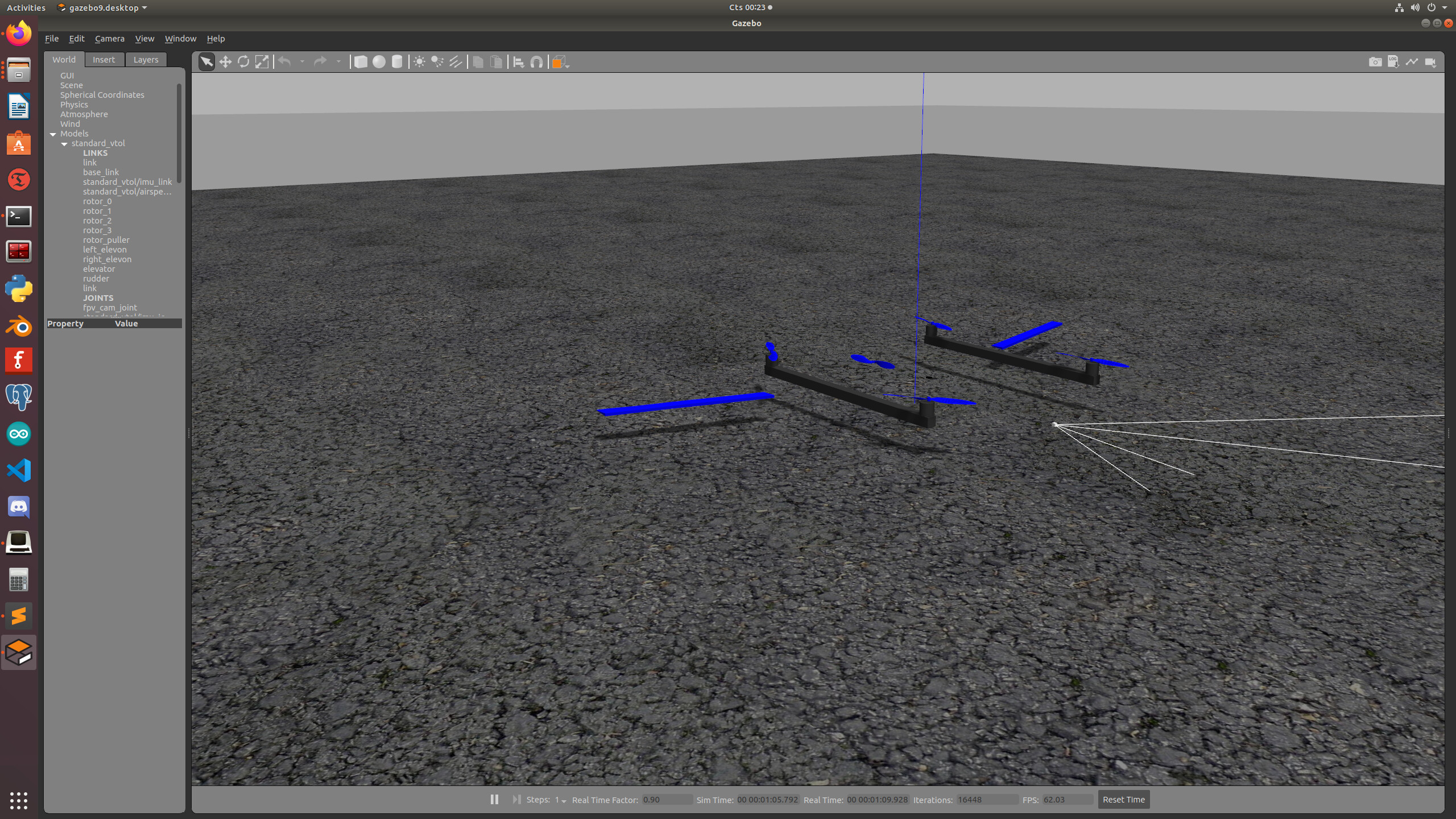
At the end, I changed the “.dae file” for standard_vtol and then this problem occurred (you can see it on the shared screenshot) which this issue is exist for trying to change any default PX4 vehicle models with your own custom vehicle models. I have done the same things at Ardupilot Gazebo models and thy are instantly changed into the model I have applied.
Therefore, I would like to ask that, how can I do the same things in PX4 too? There is zero information for such matter/subject in the internet. I will be very glad if someone would guide me to solve this problem (sorry if I complained some but I try to solve this issue for one week already), so at the end I wanted to seek guidance from discuss.px4.io section, thank you.