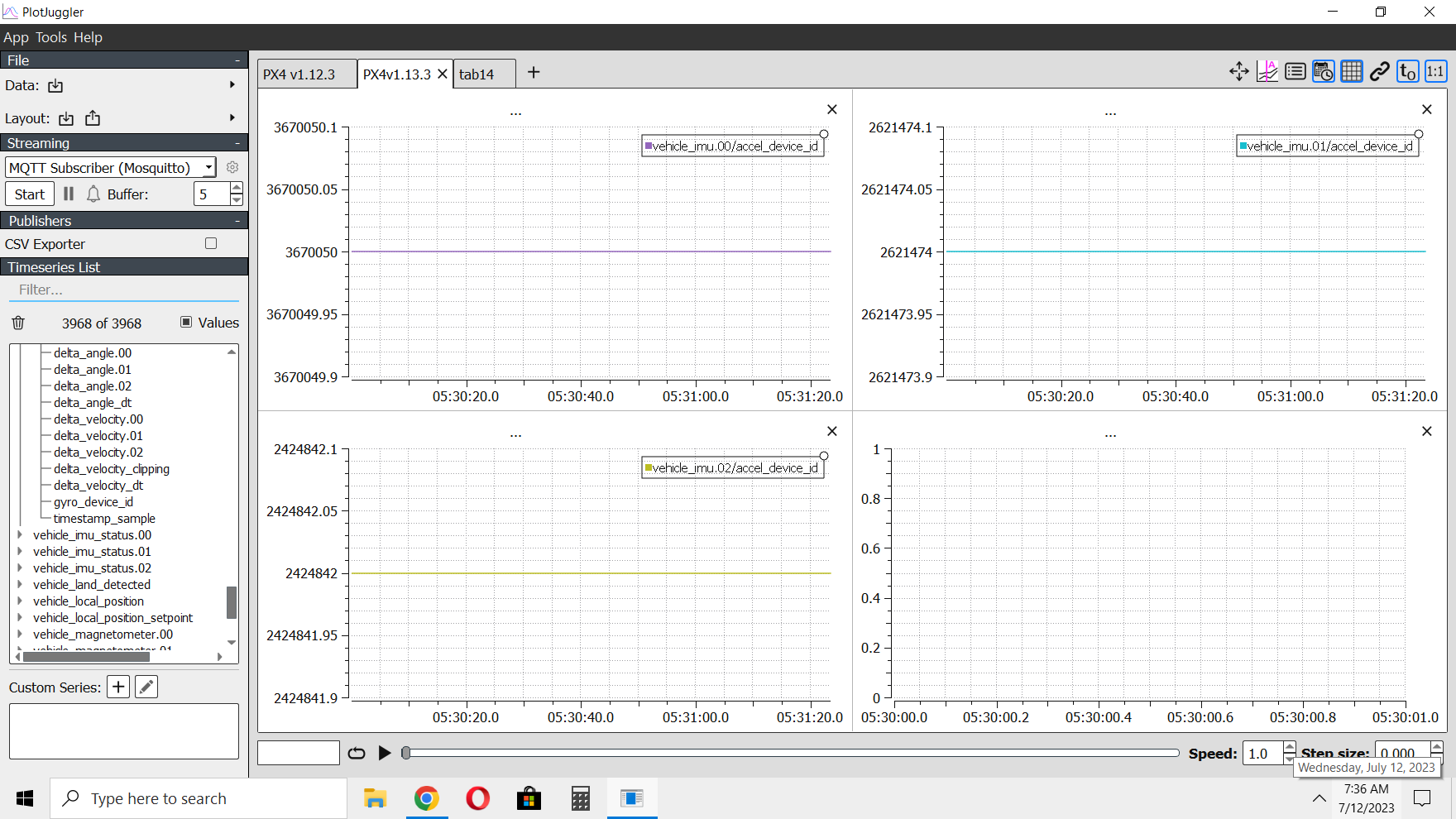
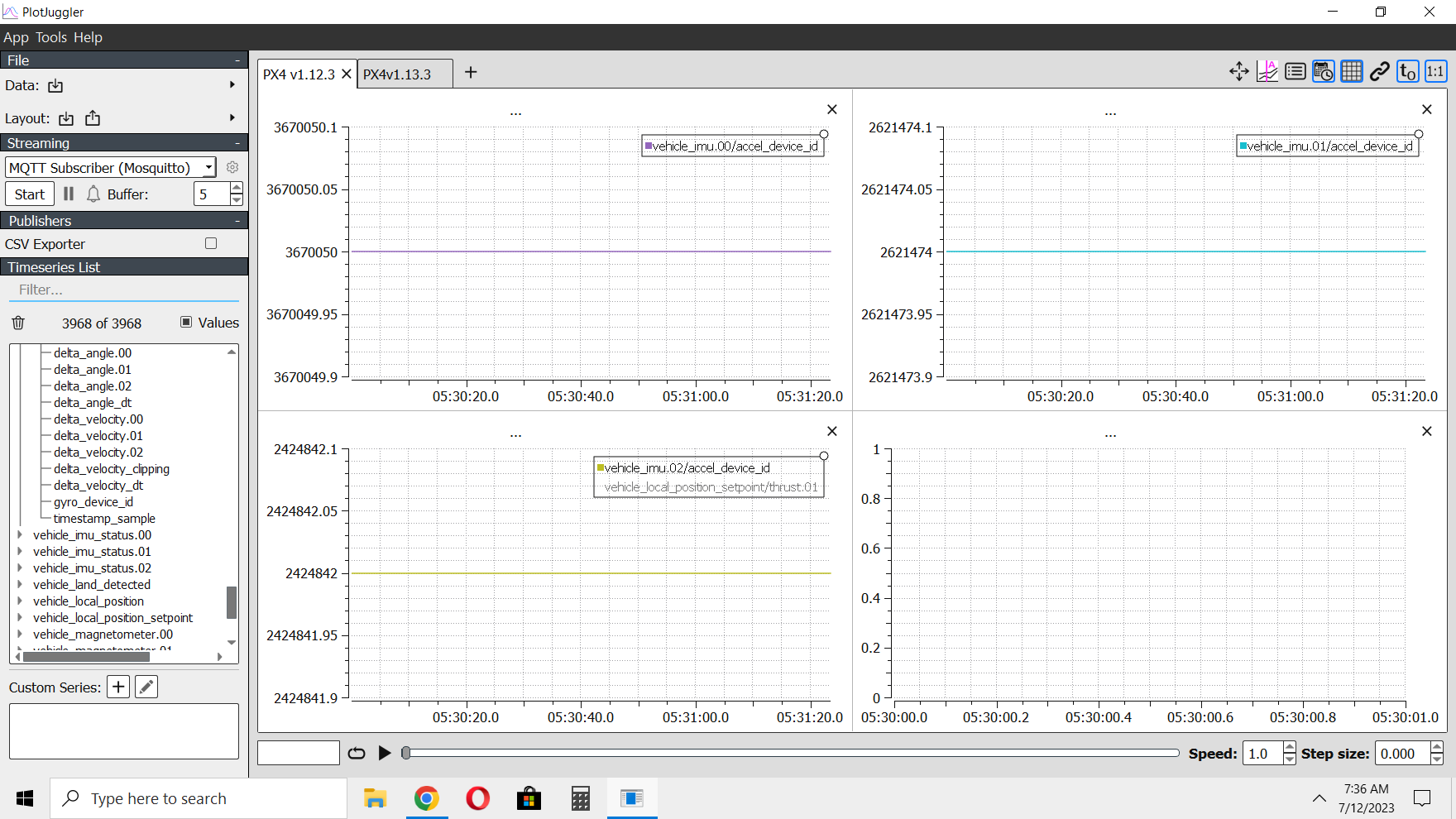
I used plot juggler instead to get the device ids of the imu by doing the following action
import data from two PX4 log files and checking the imu_device id graph. i hope this is correct. It looks the ids matched for both PX4 v1.12.3 and PX4 v1.13.3
Also attached a PX4 v1.12.3 log file taken back in Jan / Feb 2023 at the same spot
https://review.px4.io/plot_app?log=51df1330-7291-4b93-ada8-25f956907dcb
Hope this is acceptable …