Hello there
We have being flying our quadrirotor drone equipped with Cube Orange Flight Controller
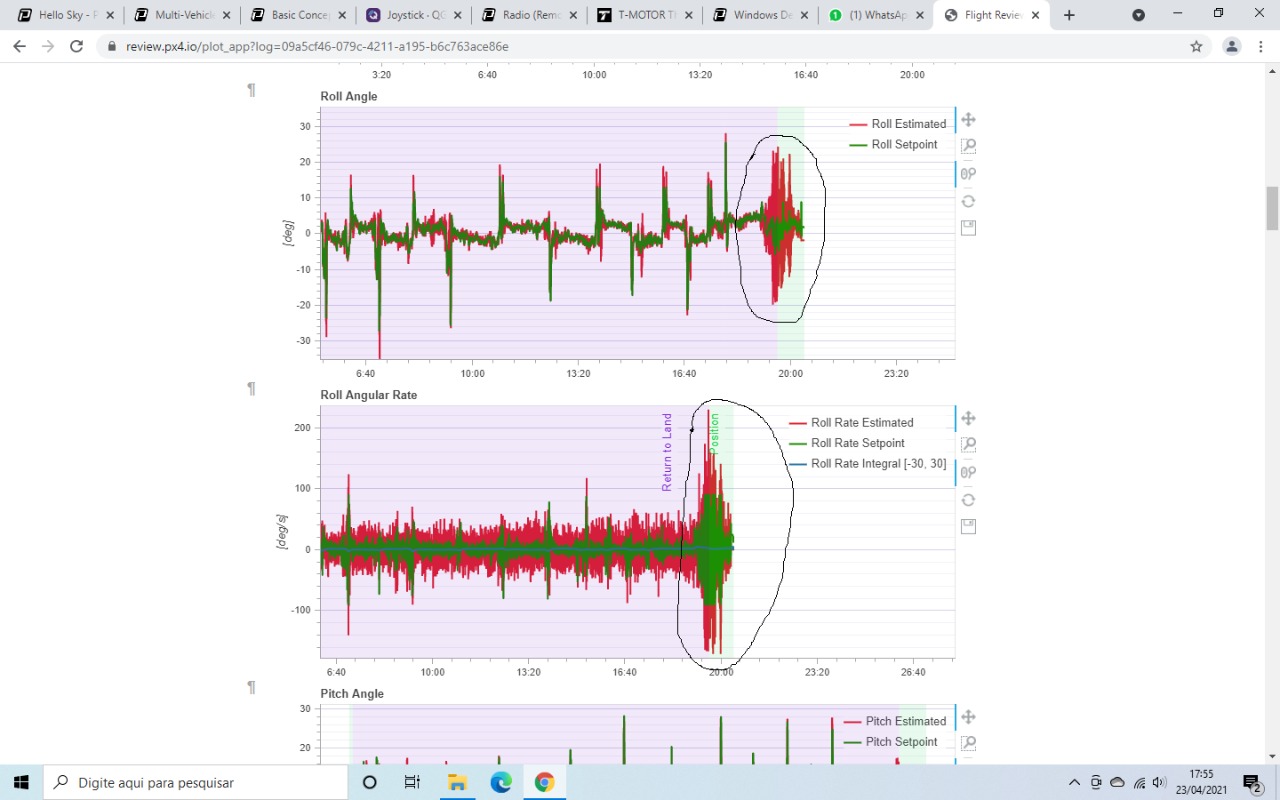
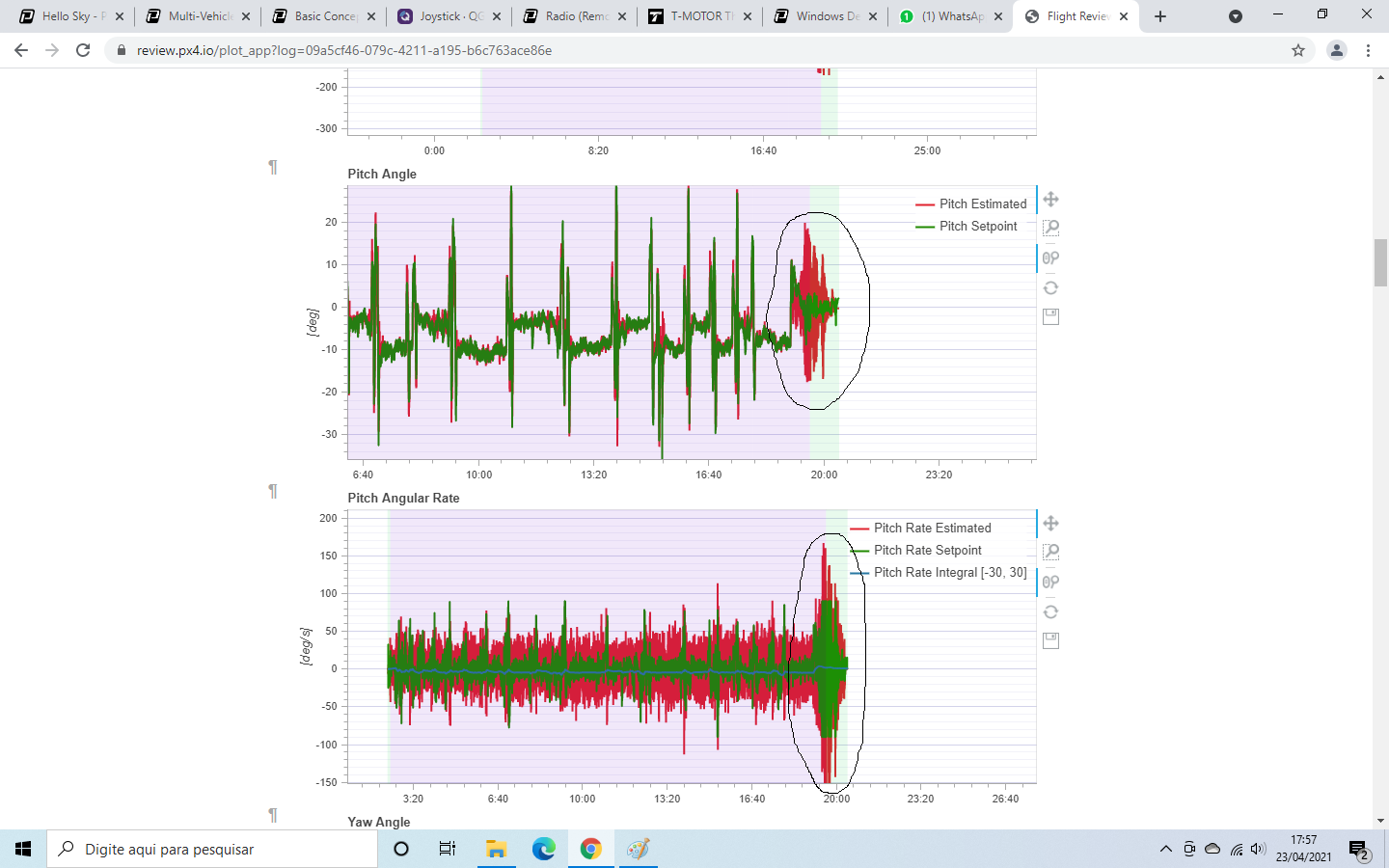
As we noted, during all flight it can be observed good tracking on Pitch and Roll angles control during Mission and RTL modes. However, approximately at 19:10, when transitioned to Position mode for landing, we noted a heavy oscillation in Pitch and Roll.
Flight log is attached here:
https://drive.google.com/file/d/1GgC8ZVeCTeAEY_7X29MJeIw7TA56NEjp/view?usp=sharing
I would appreciate any help on this issue.