I recently worked on adding a custom model of a 25 kg VTOL in Gazebo Harmonic.
When I used the formulae for calculating the motor model parameters from the this pdf, the motors become overpowered. We achieve takeoff at 20% throttle.

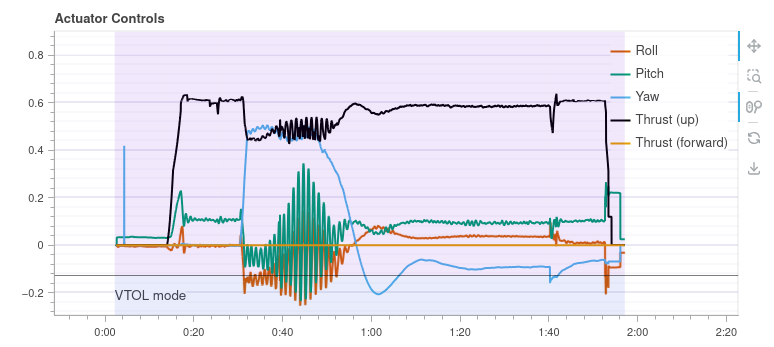
When I use the formulas from the forum, we achieve takeoff at 60%.
.
I still don’t fully grasp these motor model parameters but upon some trial and error, the desired result can be achieved.