I cannot find documentation, guides or similar on this topic.
What is the current state of detecting GPS jamming/spoofing in PX4? Are there any actions that can be made when this is detected? Show user, change flight mode etc. Looking for all infromation I can get.
I am using a Septentrio Mosiac Go-H if it helps.
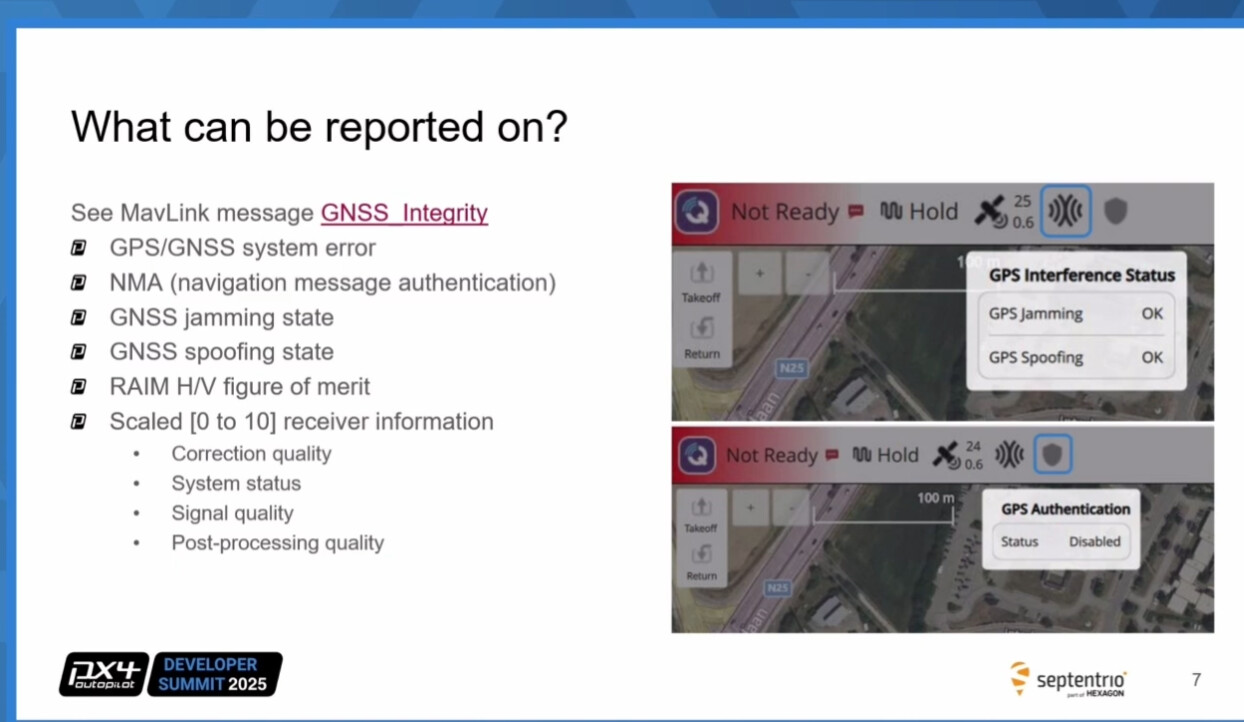
E.g how can I get the symbol shown in the presentation?