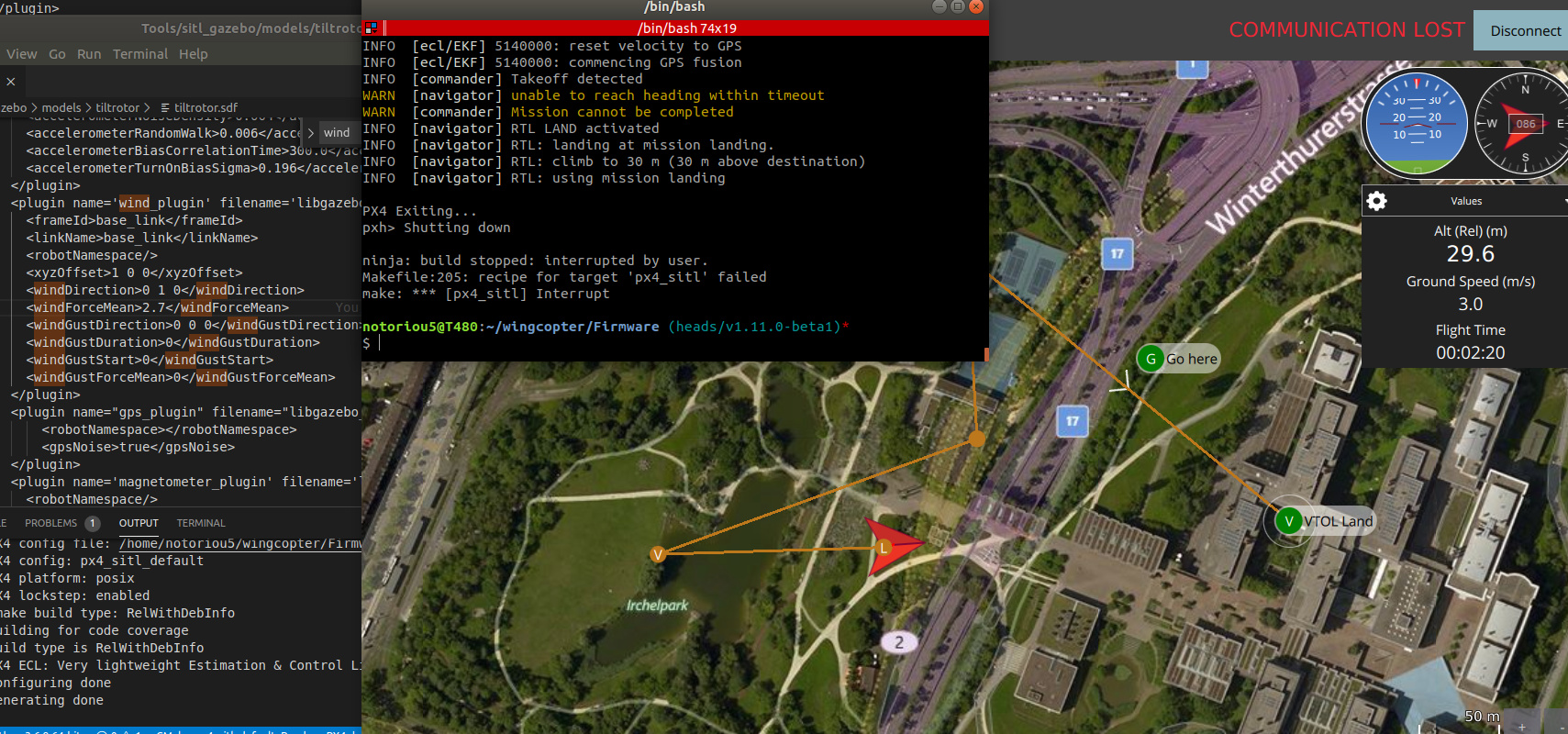
I am experimenting with the tiltrotor gazebo simulation using the libgazebo_wind_plugin. My PX4 Version is v1.11-beta.
I encountered some weird behavior when pushing the mean wind force (in the tiltrotor.sdf) to some higher values (here 2.7). When reaching the required altitude the tiltrotor wants to adjust the heading but is unable too, possibly because of the wind. The mission gets cancelled afterwards.
Does anyone know what adjustments need to be done in order to get a working SITL simulaton including wind?
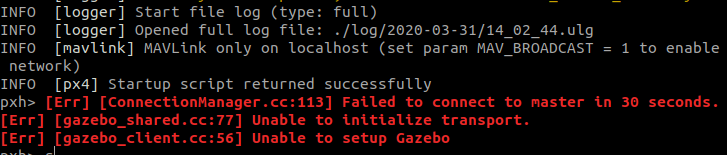
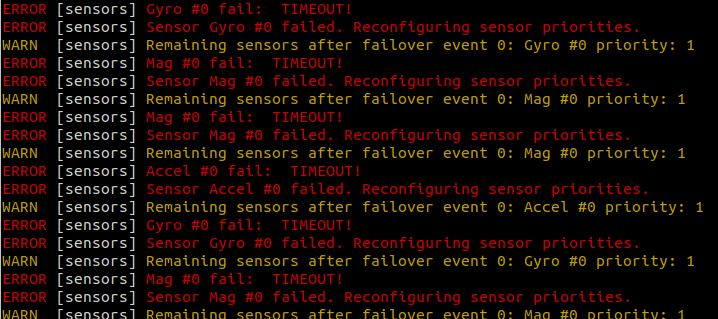
@Jaeyoung-Lim I tested your plugin today but I ran into some issues when using it together with PX4 v1.11.0-beta1. I checked out to your pr-add-wind-to-lift branch and became following issues:
Were you able to get this to work? I am currently experiencing a similar issue and would appreciate any advice. I am on px4 v1.12.3. Did you insert the contents of the plugin inside one of the world files residing at the location PX-Autopilot/Tools/sitl_gazebo/worlds/ ?