@ShlomiRR thanks for sharing your experience.
We had a very similar issue; in our case we used a VTOL in standard quadplane configuration and we experienced the issue during FW mode. We were using PX4 v1.15.4. It looks like flight termination was triggered in flight, leading to loss of control and subsequent crash. Unfortunately we could not recover the .ulg log, but looking at the telemetry .tlog file logged by QGC we were able to reconstruct the following:
- “Preflight Fail: High Accelerometer Bias”
- In the next seconds, attitude estimate was declared invalid (we got NaN values in the ATTITUDE_QUATERNION mavlink message), and immediately after, also the angular velocity estimate was invalid
- “Failsafe activated”
- “Preflight Fail: Flight termination active”
I did some research and I found this other issue which looks related: Autopilot disengaged, switching to terminate @diana_diaz
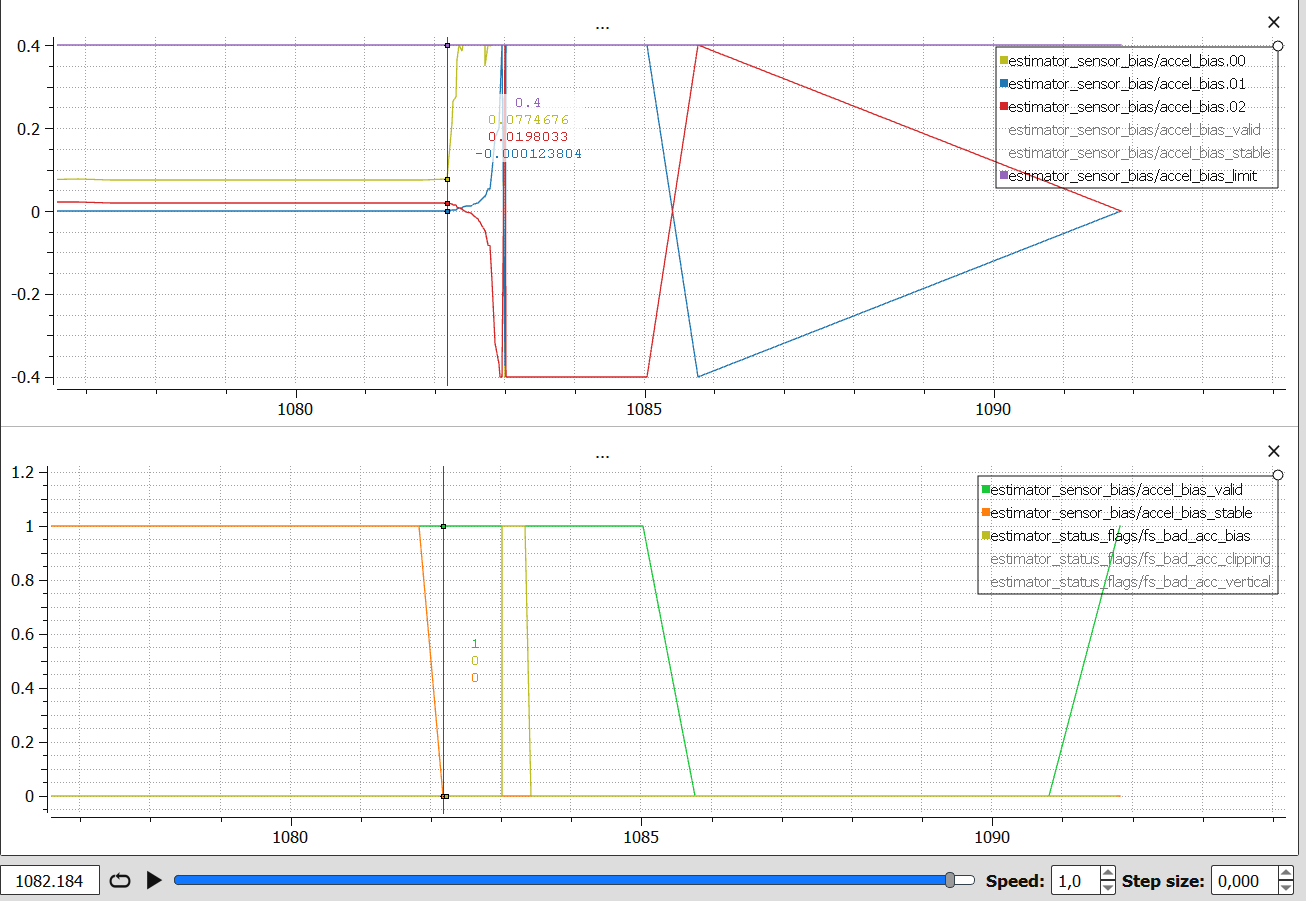
Based on your log I see that at a certain point the flag estimator_sensor_bias/accel_bias_stable goes to 0, and from that point on the accel_bias estimates diverge and saturate to the limit value.
We never experienced this kind of issue before with previous PX4 versions; I guess it might be related to the fact a new EKF implementation was introduced in v1.15, @JulianOes what do you think? I also suspect it might be related to IMU autocalibration.