Hello,
I need help to identify the problem.
I made a fixed “position flight test”. The drone is laying on a table, without props.
I have a Pixhawk 4 Flight controller and neuron 60S as ESC’s.
ESC’s are workingin DShot600 mode.
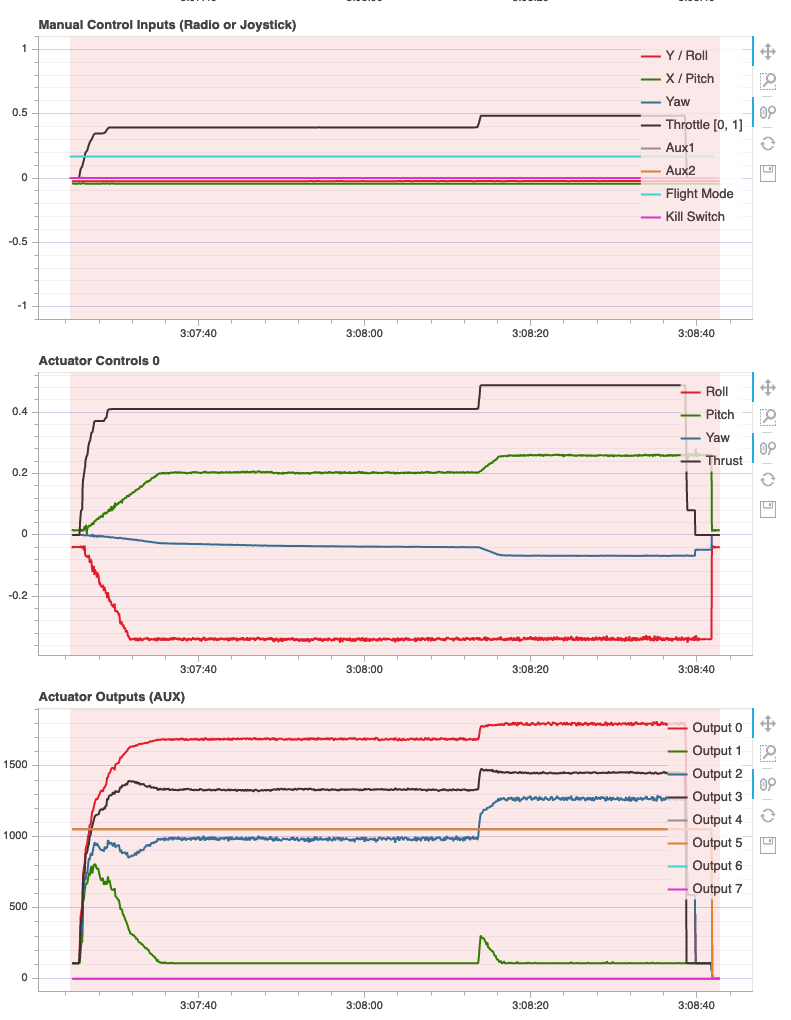
After arming I’m moving the Throttle of the remote control (FrSky Horus Express 10S) from 0% to about 40%. After some time I moved the throttle to 50%. Other remote control stick was in neutral position (no roll,pitch, or yaw).
It could be observed that the motor two is only slowly rotating.
The image below shows some diagrams from the test fligt (Flight Review).
The Actuator Output (AUX) looks unexpected for me. I expect that the outputs are on very similar level but this is not the case.
In the PX4 documentation this situation is called an inbalanced vehicle.
Not calibrated ESC’s could be a reason for that said the documentation.
I have not calibrated the ESC’s (neuron 60S) because a ESC in DShot mode do not require calibration as stated in the documentation.
Are the Actuator Output (AUX) lines in the diagram strong hint for a problem ?
What can I do to solve the problem ?
Are the Actuator Output (AUX) signals related to the ESC’s output / (consumed power of the motors) or are the signals only related to the flight controller output signal which goes to the input of the ESC’s ?
Best regads
Andreas