Hello PX4 community,
I’m trying to monitor the state of the estimator and the associated covariance values over time to better understand its behavior during flight.
I’m currently observing something I don’t understand:
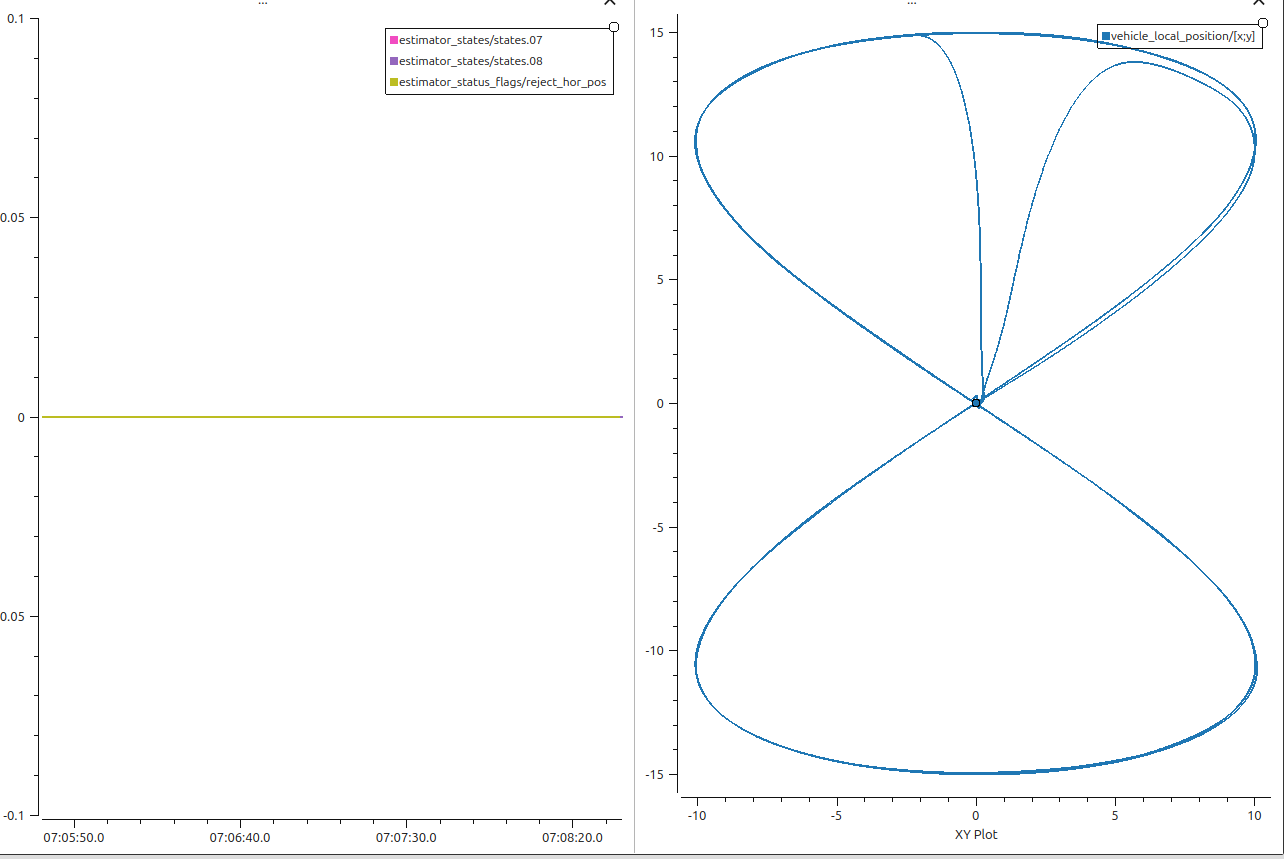
In the estimator_states message, the horizontal position states (index 7 and 8) remain constant at 0 during the entire flight, even though the vehicle is clearly moving.
Index 9 (z) is perfect…
Interestingly, these states are not being rejected by the filter, as shown in the attached screenshot (see below). I also verified that the EKF is running, and the state estimation seems active in other dimensions.
Here is what I’ve checked so far:
-
I’m using PX4 version PX4 version: 1.16.0 c0 (17825984)
-
I checked
estimator_status_flagsand no relevant rejection flags are set -
The position estimate vehicle_local_position (so output of the ekf2…) looks perfect and tracks the motion
What could explain this behavior?
Is there a reason the internal estimator state for horizontal position (index 7, index 8) would be held at zero despite apparent movement and no filter rejection?
Thanks in advance for your help!