We were running the generic quadcopter airframe with no changes. The ESCs signal wires were just wired to M1-4 on the I/O PWM outputs, with the signal grounds connected to the ESC power grounds (just a standard PWM setup). I’d calibrated all the ESCs with PWM_DISARMED = 900us. We were able to get the motors running, but they were all turning counter-clockwise. So we switched round the PWM signal in QGroundControl for motors 3 and 4 (front left and back right). After a few more times of testing, the motors were still all spinning anti-clockwise, and they also all started spinning really fast when we armed the vehicle, and so we re-calibrated the ESCs at 900us, and re-ensured that the signals on MAIN 3 and 4 were reversed.
Now what I then did (this was possibly not smart), was set PWM_MIN to 950us, and rebooted. The reason was we wanted to test the setup running very slowly, without arming.
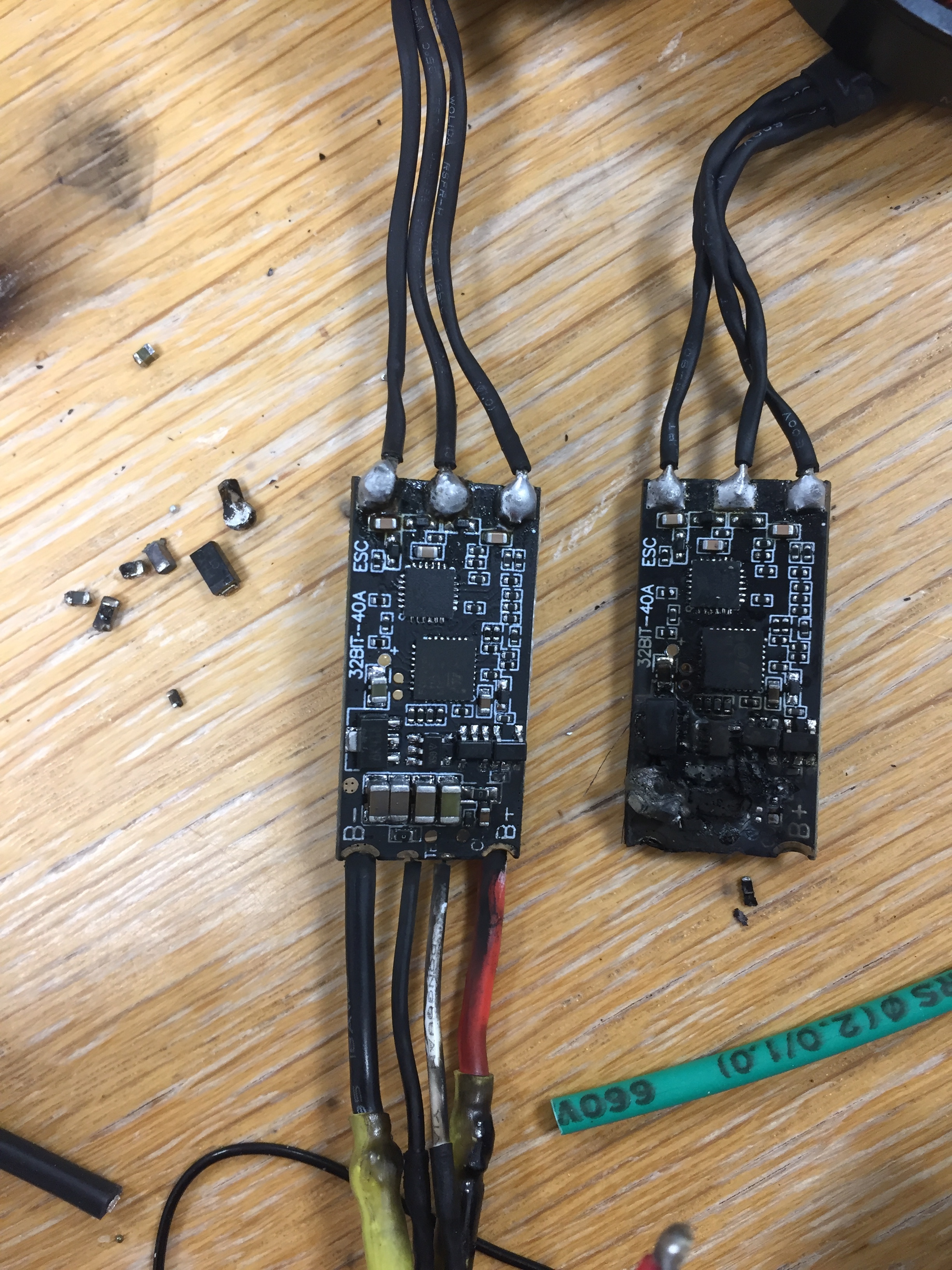
When the vehicle rebooted, motors 1 and 2 started turning slowly as expected (we haven’t armed at this point). However, motors 3 and 4 weren’t turning at all. We were discussing why this might be, but then the ESC of motor 4 suddenly burst into flames! We disconnected the battery immediately and the ESC burned out.
What was really strange about all this, was that the motor connected to the ESC that went out was never spinning at any point. The obvious possible explanation for this would be an internal fault in the ESC that caused a short that bypassed the motor, but I was wondering if anyone could help with the following:
Is there anything that sounds wrong in the setup I’ve described above, that could have been a potential cause?
For the future, would anyone know why the PWM reverse parameters wouldn’t work properly? It’s only just occurred to me, but I can’t actually remember if we re-calibrated the ESCs after reversing the directions in the software, but I’m guessing that’s also a good idea/necessary?
Reversing pwm signal might have caused esc to spin upon powering up which ended up shorting circuits I guess.
Reversing the rotation of BLDC motor can be done by switching any of two wires among 3 wires connected between ESC and motor not reversing the pwm signal.
I personally prefer calibrating esc with rc receiver if possible and not with fc.
Good luck
So if I did this but didn’t recalibrate afterwards, I guess the zero level for the ESC signal input may have been at +5V 900us 400Hz PWM signal, rather than -5V 900us 400Hz PWM signal?
I don’t even know is this how the PWM_MAIN_REV parameters work (as in, do they just flip the sign of the signal voltage?)
@tbrs2
PWM signal is meant to represent 0~100% for 1000 us to 2000 us and there is no negative command here unless your ESC is capable of reversing at certain threshold like any signal shorter than 1500 us means negative while anything above means positive throttle.
Otherwise the only way to reverse the spin is swapping wires as I said in the earlier comment.
PWM_MAIN_REV is for changing polarity of the pwm such that width of low pulse represent throttle.
Trying to understand exactly what you mean by this. Do you mean that enabling PWM_MAIN_REV will flip the signal so that when it would usually be + it’s 0, and when t would usually be 0 it’s +?
That is exactly right.
Positive pwm looks like |~|____|~|____
while Negative pwm looks like ~|___|~|___|
and this has nothing to do with the direction of spin.
Thanks Kyu. What a disaster! I guess reversing must either be done via the ESC firmware or just switching two motor connections, and can’t be done from the FC alone.
You’re right, to change the direction (in this setup) you need to change a setting in the ESC or switch two motor wires.
There is also a very good chance this will happpen with all the right settings.
These ESC’s are made for tiny racing quadcopters with smal motors and short wires (and the same big current). They need axtra capacitiors if you want to use them in a bigger quadcopter.
Ah very interesting, thanks Nando. Rather than the capacitor, do you think it would be safe enough to just lengthen the motor-esc wires (shortening the battery-esc wires down to normal) instead, as it suggests in your link? Our frame is 65cm motor to motor.
The best thing is to do both, I personally don’t dare to not have a capacitor in there in something this large. These tiny smd caps are not ideal, their capacitance on one of those esc’s is so much less than anything you could buy a few years ago. And its really cheap and easy, just slightly bulky and fragile.
With a 4 in one esc i use only 1 extra cap.