test@sus:~/Desktop/catkin_ws/src/PX4-Autopilot$ roslaunch px4 posix_sitl.launch... logging to /home/test/.ros/log/14854b44-9852-11ef-ac8c-a14bfa38662b/roslaunch-sus-53684.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
Resource not found: The following package was not found in <arg name="world" default="$(find mavlink_sitl_gazebo)/worlds/empty.world"/>: mavlink_sitl_gazebo
ROS path [0]=/opt/ros/noetic/share/ros
ROS path [1]=/home/test/Desktop/catkin_ws/src
ROS path [2]=/opt/ros/noetic/share
ROS path [3]=/home/test/Desktop/catkin_ws/src/PX4-Autopilot
ROS path [4]=/home/test/Desktop/catkin_ws/src/PX4-Autopilot/Tools/sitl_gazebo
The traceback for the exception was written to the log file
Could you describe more what you are trying to do?
Which platform is this? Ubuntu? Which PX4 version?
Usually, you do not need to have PX4-Autopilot under your ROS workspace source.
")
Have you looked at this?
Or also our docs?
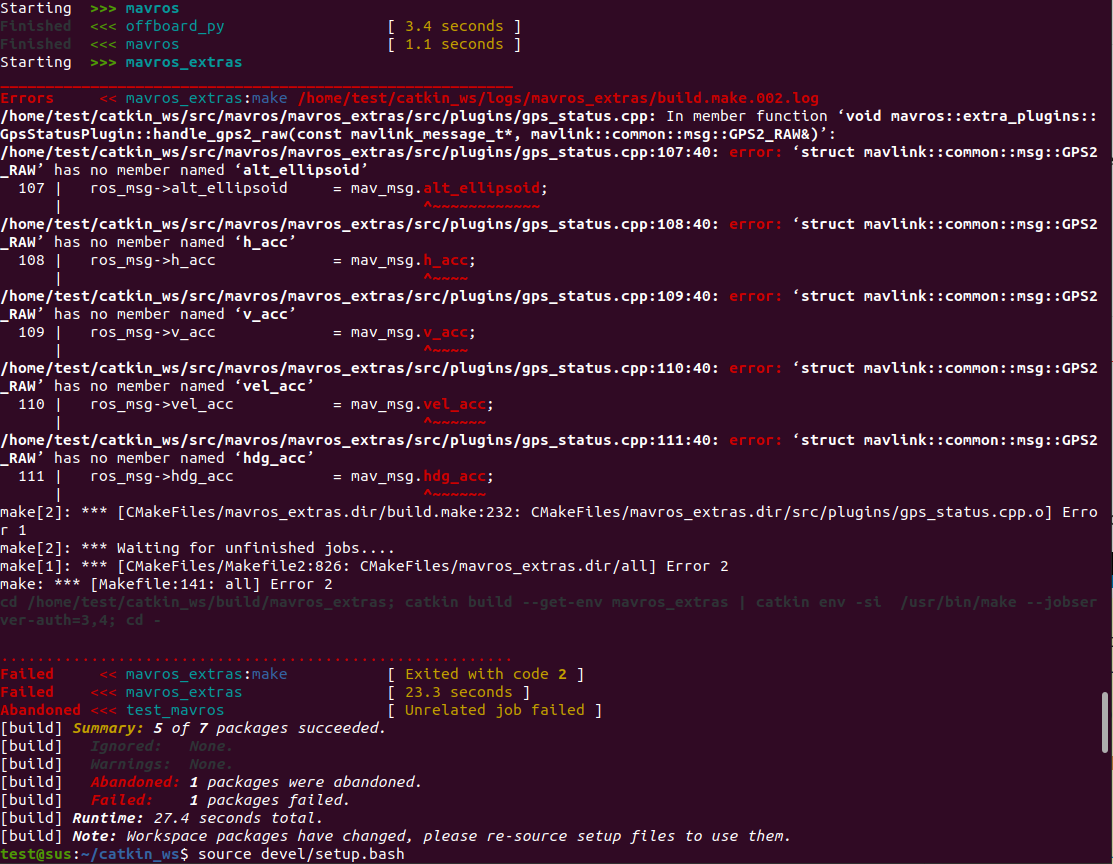
Yes, I understand that PX4-Autopilot is needless inside the ROS Workspace source. I am on ubuntu 20.04, ros noetic, current px4, earlier in my previous query I had imported an “mavros controller” repo of Jaeyoung-Lim but failed, currently following the above very documentation tutorial. When I am building the catkin workspace, 2 of the 7 packages are not building.
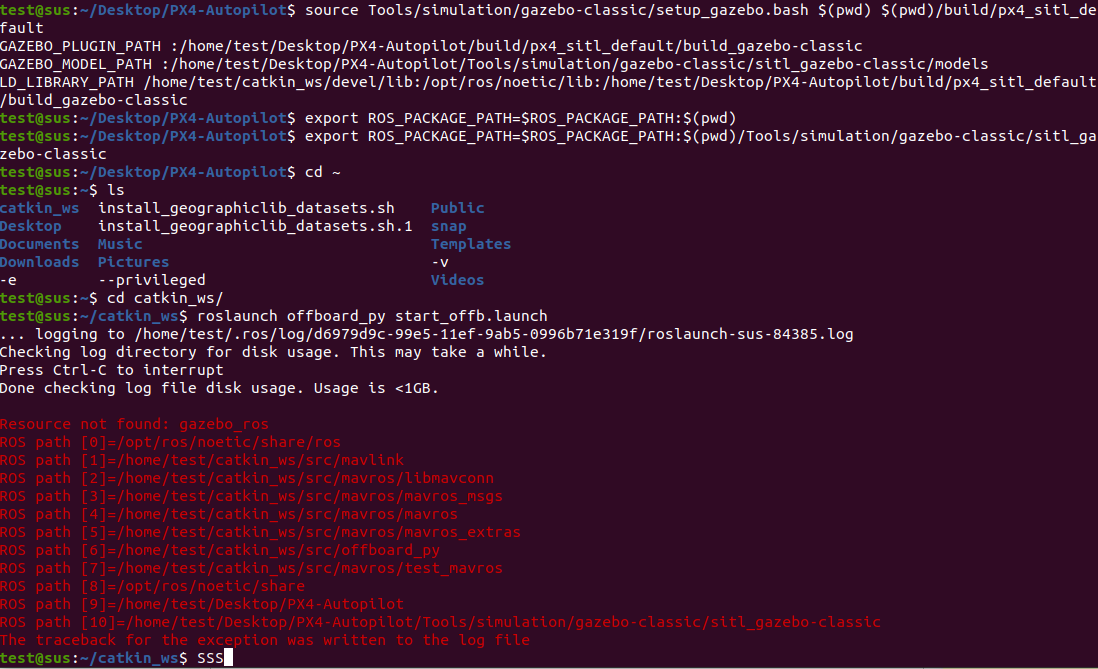
Subsequently, the roslaunch command is throwing error. I also have necessary things sourced.
hmm,
Have you installed Geographic lib?
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh
sudo bash ./install_geographiclib_datasets.sh