We have recently released a new product that is fairly unique in this market — an electropermanent magnetic gripper for payload attachment:
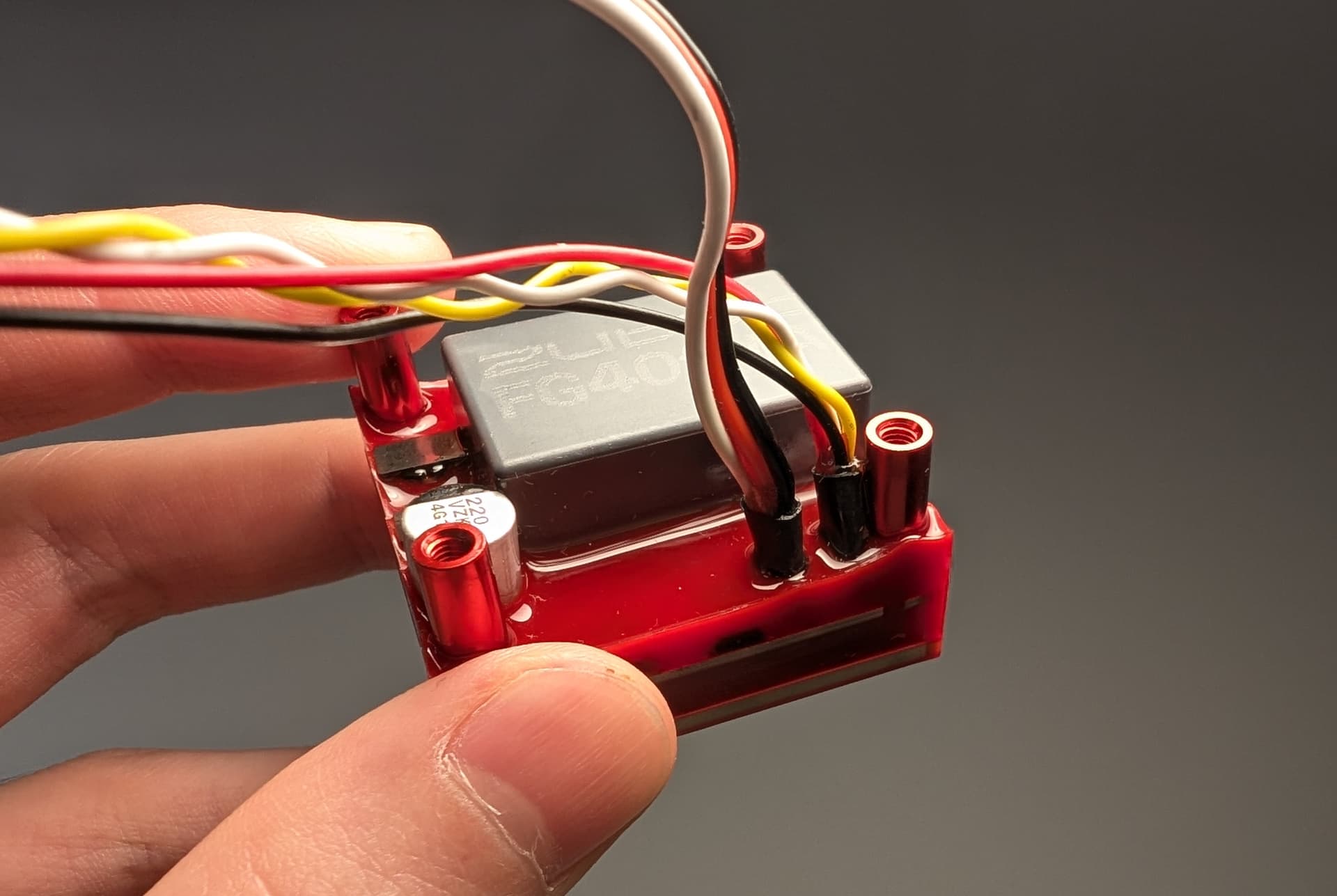
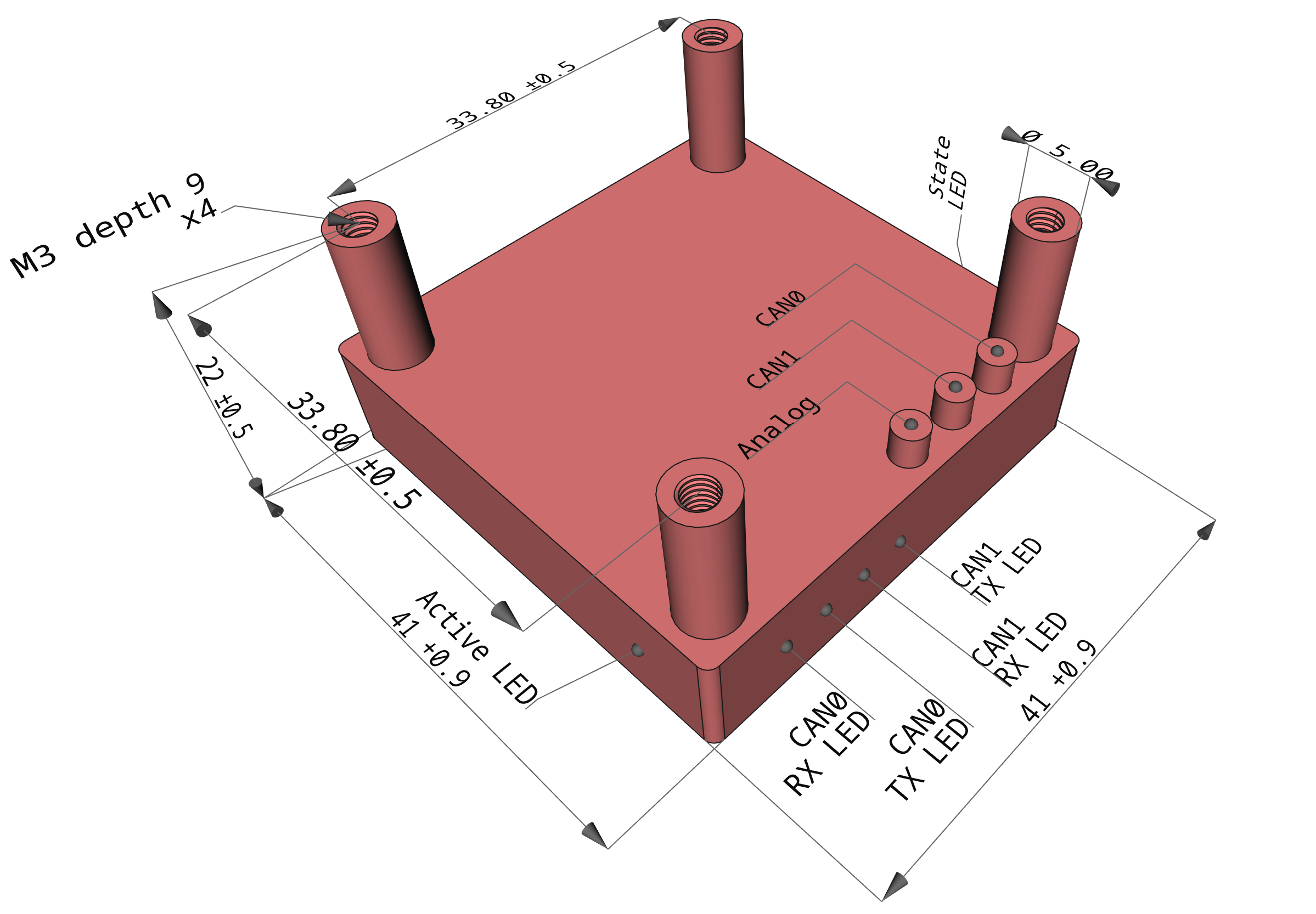
It combines the advantages of electro- and permanent magnets by being able to switch between the on-state and off-state on demand (like an electromagnet) while consuming zero power in either state (like a permanent magnet). The magnet is very strong — the holding force approaches 25 kgf — while being quite compact (4x4x2 cm, or about 1.5x1.5x1 inches) and lightweight (72 g). Multiple magnets can be arranged to operate in lockstep to increase the total holding force or provide redundancy.
The device can be controlled via CAN bus (with telemetry) or via the standard RC PWM port, like a servo. The power supply voltage is from 4 to 30 V, so it can be powered directly from a servo port, CAN bus, or from a 2S-6S battery. The switching energy consumption is about 4 J; idle power consumption is basically zero. The device is heavily weatherized and submersible.
There are no moving parts inside, so it does not have the failure modes typical for conventional electromechanical alternatives while providing comparable holding force for its mass.
Yours truly have recently showcased the product at an expo (apologies for the poor sound quality; expos tend to be noisy):
")
Remember that the magnet does not require power to hold the payload; this is not an electromagnet!
More info about the product is available on the website: FluxGrip - Zubax Robotics
Here’s the technical datasheet & user manual: https://files.zubax.com/products/com.zubax.fluxgrip/FluxGrip_FG40_datasheet.pdf
The product is already in mass production. We ship worldwide from Europe (barring trade restrictions) and are looking for distributors.
Some time ago there used to be a related product called OpenGrab EPM that some may be familiar with, but it is no longer in production; this new product is an almost drop-in replacement for that.
I would be happy to answer questions if there are any!
