I’m flying a Pixhawk2.4.8 on a F450. My drone have the tendency to fly upwards even when my RC stick is a hover position. What should I do?
Hi @britson,
It could be a lot of different things. Could you share a log file? (logs.px4.io)
1 Like
Thanks @bresch for responding, I have been stuck at this issue for really long. Below are two logs.
https://review.px4.io/plot_app?log=a0ac38ca-404c-49d0-bfb2-d0d04e099008
https://review.px4.io/plot_app?log=50b03eb0-1f22-407e-9ad2-0eadc9842068
Basically what i’m doing here is autonomous. Rising to 1m first, then rise to 1.5m. But when the drone begun to rise to 1.5m - it will rise all the way to the ceiling.
Those log files did not seem to have any details.
What kind of details?
Look at this one on yours i just get the header:
https://review.px4.io/plot_app?log=80203a1c-ab1e-4b06-b7ad-561b1f1844ed
vs mine

@britson look at the altitude setpoint, shouldn’t you have a static value?
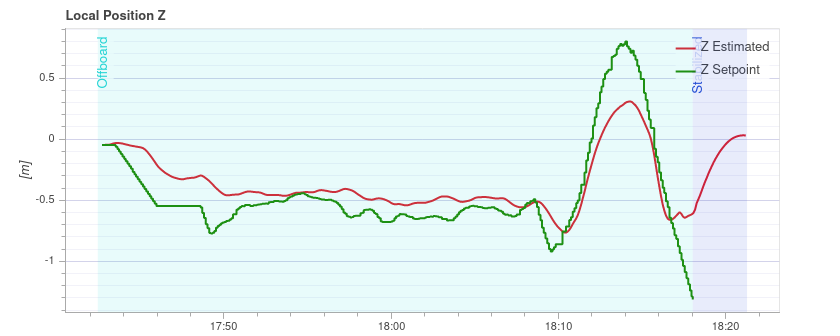
This is most likely due to what you send from your companion computer and not PX4 itself