Hi everyone, I’m new to the forum and I recently started a small project for a boat.
As components I’m using:
Flightcontroller: Pixhack 6x
RC and receiver: Skydroid H12
ESC: Basic Esc BlueRobotics
QGC App for Windows and Android
PX4 firmware: 1.14.0
Not being very practical, I set the Rover standard as Airframe, in particular that of the Aion Robotics R1 UGV because it better reflects what I am trying to achieve.
I would like to create a boat with two engines that manage thrust and steering at the same time.
I set everything up, calibrated all the calibratables, made all the connections, tested the motors by QGC (they work) and initialized the drone.
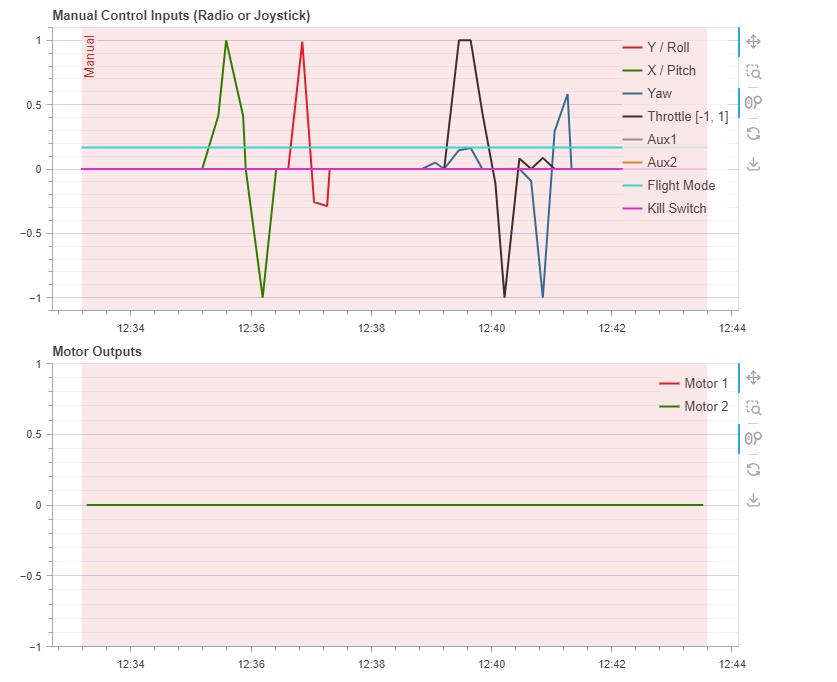
I armed the drone via the remote control but when I start trying to control it via the sticks it has no reaction. The engines don’t start. I downloaded the log and in reality the signal is read but there is no reaction from the engines.
Here the link to see the log:
https://review.px4.io/plot_app?log=daf3cde0-04da-4f53-839b-53428ba86ad3
I saw a similar post with the same problem, but I can’t find the file they’re talking about in the SD.
Does anybody know, what the problem might be? I’m running out of ideas.
Thanks for your help!