I’m trying to set up my drone based on PX4 on a DJI F450 but I’m still experiencing a counterclockwise rotation. It is slow but continuous. I already calibrated the sensor many times but I’m always experiencing this behavior. I already tuned the yaw pid component. I tried also the GPS but is always the same.
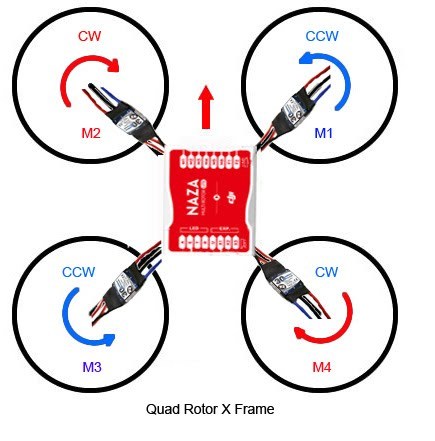
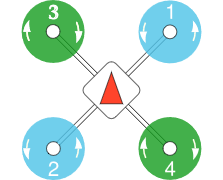
Thanks Serge. Yes I choice the X Frame. The Fly Controller is oriented with 0°, but it is set back from the center of gravity (2/3 centimeters at most). This can influence the hovering also in position fly mode?
I use the Autopilot Pixhawk 4 wich not center. The Autopilot and the GPS must been calibrated together.
The IMUs are inside autopilot (in front) and GPS antena (in rear)
I have been configured and calibrated with QGC. https://docs.px4.io/en/config/flight_controller_orientation.html