Description:
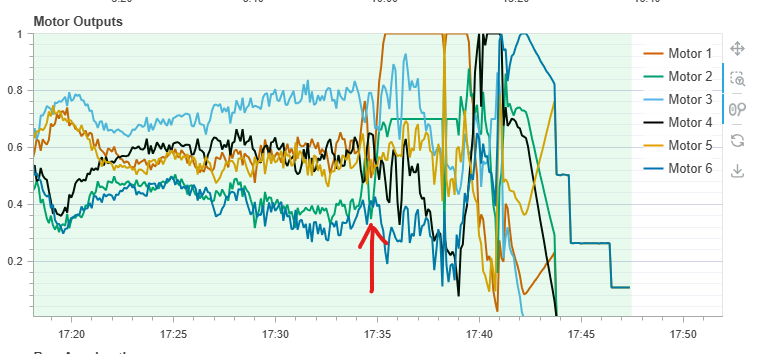
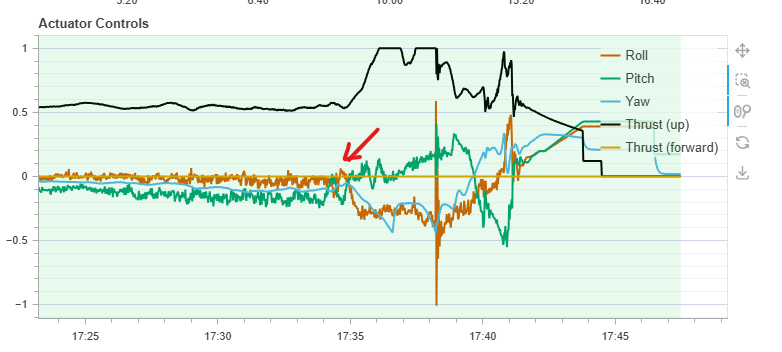
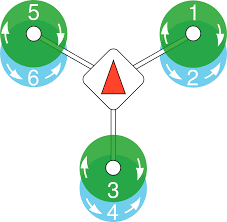
During a flight test last week, the propeller of my Y6 coaxial drone accidentally severed the ESC cable of motor 1 (about 17:35), causing that motor to fail. After the failure, there was a noticeable attitude disturbance, and the vehicle eventually landed almost level before tipping over. Fortunately, thanks to the PX4 control logic, the situation did not lead to more serious damage.
The motors used are not particularly powerful (lab test: 6.9 kg @ 48 V), so I can understand that at a lower voltage (around 41.5 V), the vehicle might not have enough thrust margin, which could result in a crash(total weight: 11.5kg).
However, when reviewing the motor outputs in the log, I noticed that motor 1 was saturated, but motor 2 only reached about 70% throttle.
We are using closed-loop ESCs based on RPM control, but there is currently no RPM feedback provided to the flight controller.
Question:
Why didn’t the flight controller increase the output of motor 2 further to compensate for the failed motor 1?
Any suggestions or insights would be greatly appreciated! ![]()
Below are the video and log file links for reference.