Hello!
I’m trying to connect MAVsdk python and QGroundControl. Also I wanna use my telemetry module which is Holybro Sik.
My telemetry module is already connected with QGC well. What Im trying to do is making command with mavsdk python to takeoff and fly to the specific position.
When Im trying to connect msvsdk to telemetry or QGC. But it didn’t work😥
Do I have to something extra things on QGC to connect QGC and mavsdk?
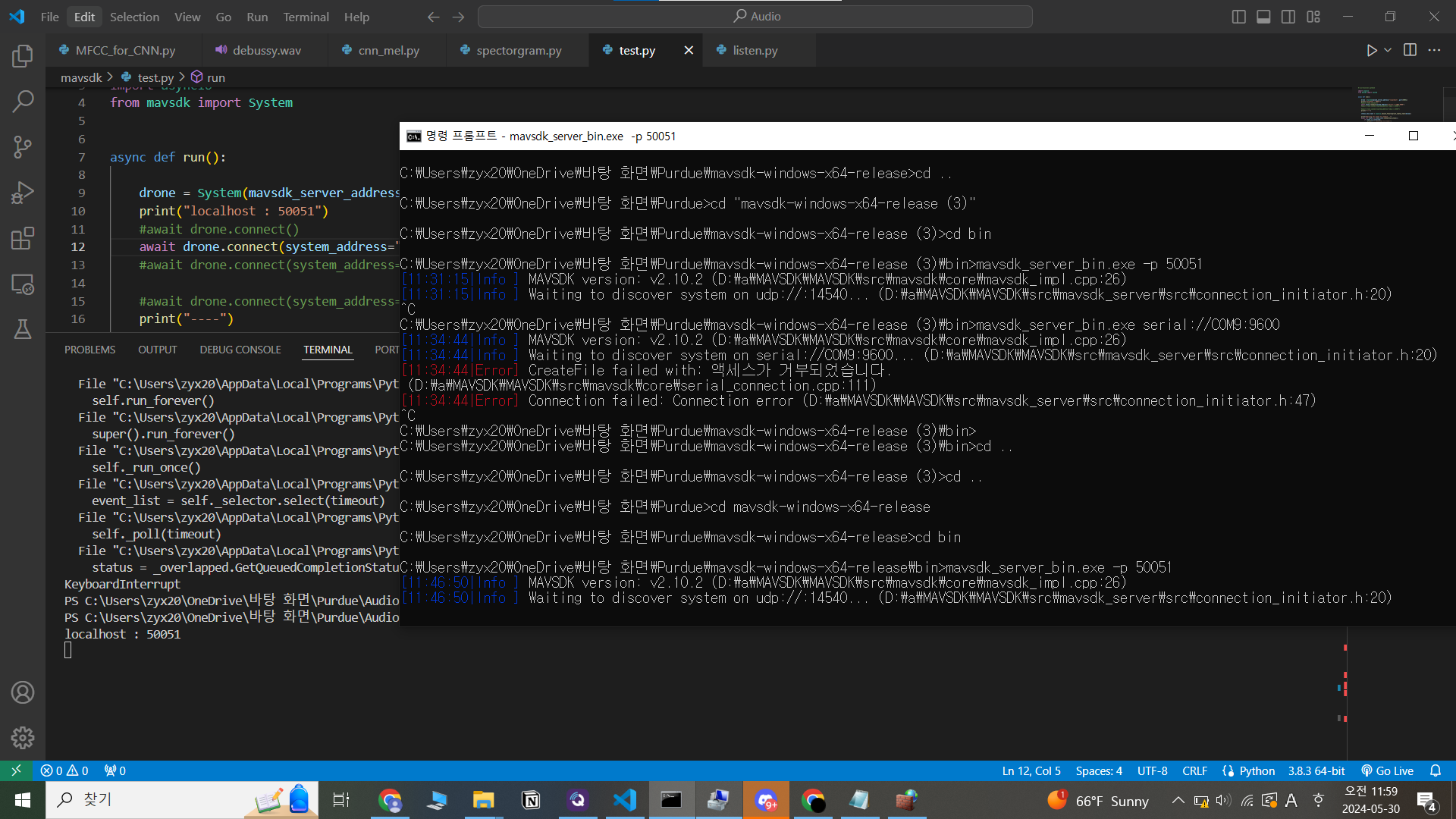
import asyncio
from mavsdk import System
async def run():
drone = System(mavsdk_server_address="localhost", port=50051)
print("localhost : 50051")
await drone.connect(system_address="serial:///COM7:9600")
if __name__ == "__main__":
# Run the asyncio loop
asyncio.run(run())