Hi, i can’t not run mavsdk_server to connect my px6c like img below
Please give me some advice !! Tks a lot
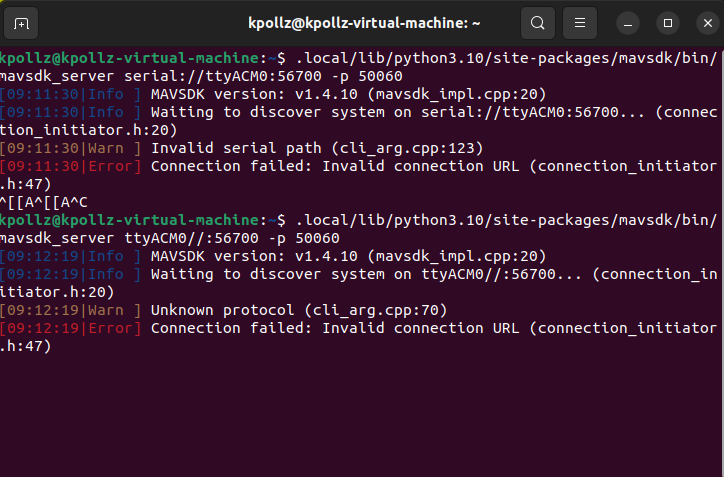
Hi, i can’t not run mavsdk_server to connect my px6c like img below
It says invalid connection URL, which is correct.
You specified: serial://ttyACM0:57600 but it should be serial:///dev/ttyACM0:57600
Tks for your advice. I have another question, why I run mavsdk_server with udp://:14500, i can run qground control parallel, But when i run mavsdk_server with serial protocol to connect to the hardware, i can’t runqground control parallel. How to fix that, because my project must run parallel with QGC.
You need to either forward the connection in QGC, or forward it in MAVSDK and then connect to the port created by MAVSDK.
You can do that by adding two connections and setting forwarding on:
https://mavsdk.mavlink.io/main/en/cpp/guide/connections.html#forwarding-mavlink-between-connections
I still don’t quite understand, can you be more specific. About my project use: MAVSDK - Python, and in order to connect multiple PX6 I need to run mavsdk_server manually, but that doesn’t allow me to run QGC in parallel.
Oh, right, if you’re using MAVSDK-Python, then that’s not easily available, unless you build a forwarding binary using MAVSDK C++.
Alternatively, you can split the connection using MAVLink-Router.
With MAVlink-Router Can i split serial connection to UDP connection ?! And how can I use this ?!
By reading the mavlink-router documentation.
Thank you for assisting me. I have successfully split the Serial port to 2 UDP ports to both catch QGC and catch MAVSDK_SERVER. But there is another small problem that it is only one drone, what if 2 or more drone ?!
You start another instance of mavlink-router and use a different port number for it.