Hi!
I would like to connect my ground station computer that has ROS to my onboard computer that also has ROS while the onboard computer talks to the Pixhawk. I want to do this without wifi.
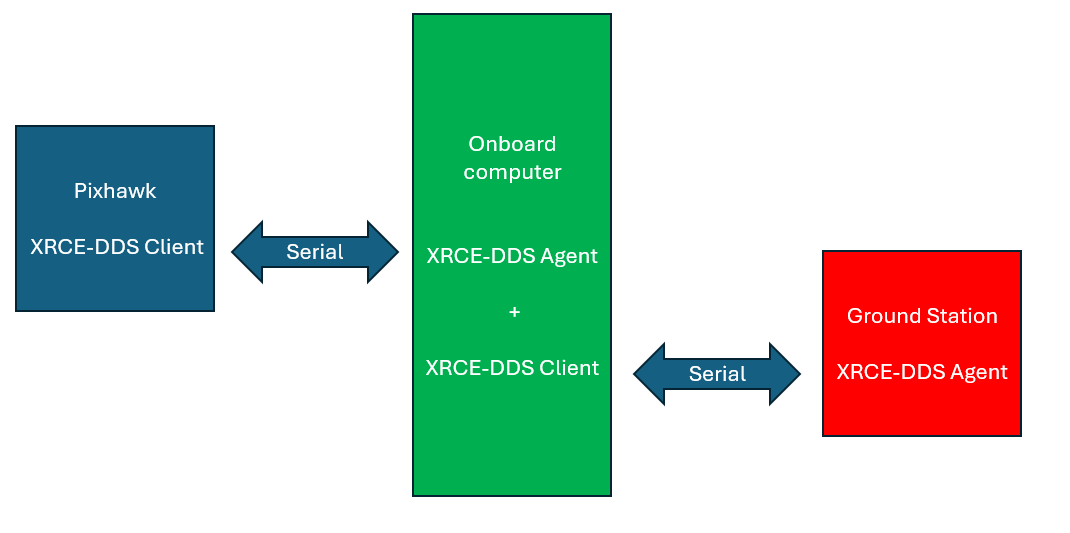
The objective is that I want to have ROS2 nodes on my ground station computer be able to publish ros2 topics that the onboard computer subscribes AND be able to subscribe to 1-2 topics from the pixhawk. I need to do this without wifi I have attached a diagram.
My questions are:
Is the best way to do this is to setup another XRCE-DDS client on my onboard computer and have another XRCE-DDS agent connected via serial on my base station computer? Is there another way?
Is there a better way to communicate ROS2 topics over longer distances than wifi allows? Is serial communication over radio the route to go?