Hi guys,
I am trying to fly using mainly the barometer since the GPS will not work in my indoor environment.
The problem however is that it seems that the GPS is the main contributor to the local setpoint z as this barely changes although a change in altitude from the barometer data can be observed.
https://logs.px4.io/plot_app?log=9fde22b3-7fb6-43a6-9d02-28289f7cfb71#Nav-Altitude-Estimate
Is there a way to make the weight of the barometer higher or completely disable the GPS for the height?
I am running the gps as a fake at height 20.
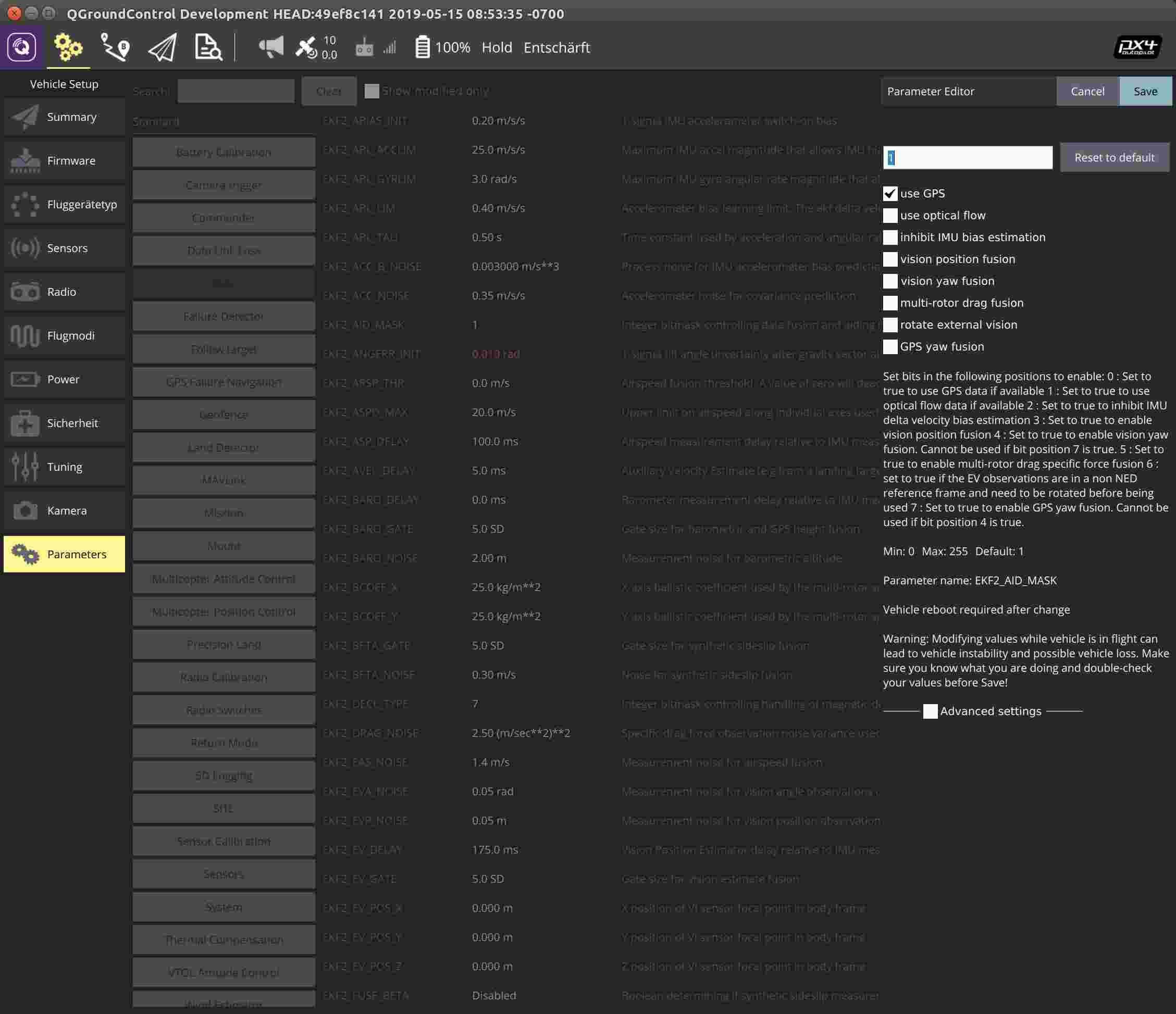
You can disable the GPS via QGC parameter settings - f.e. EKF_AID_MASK.
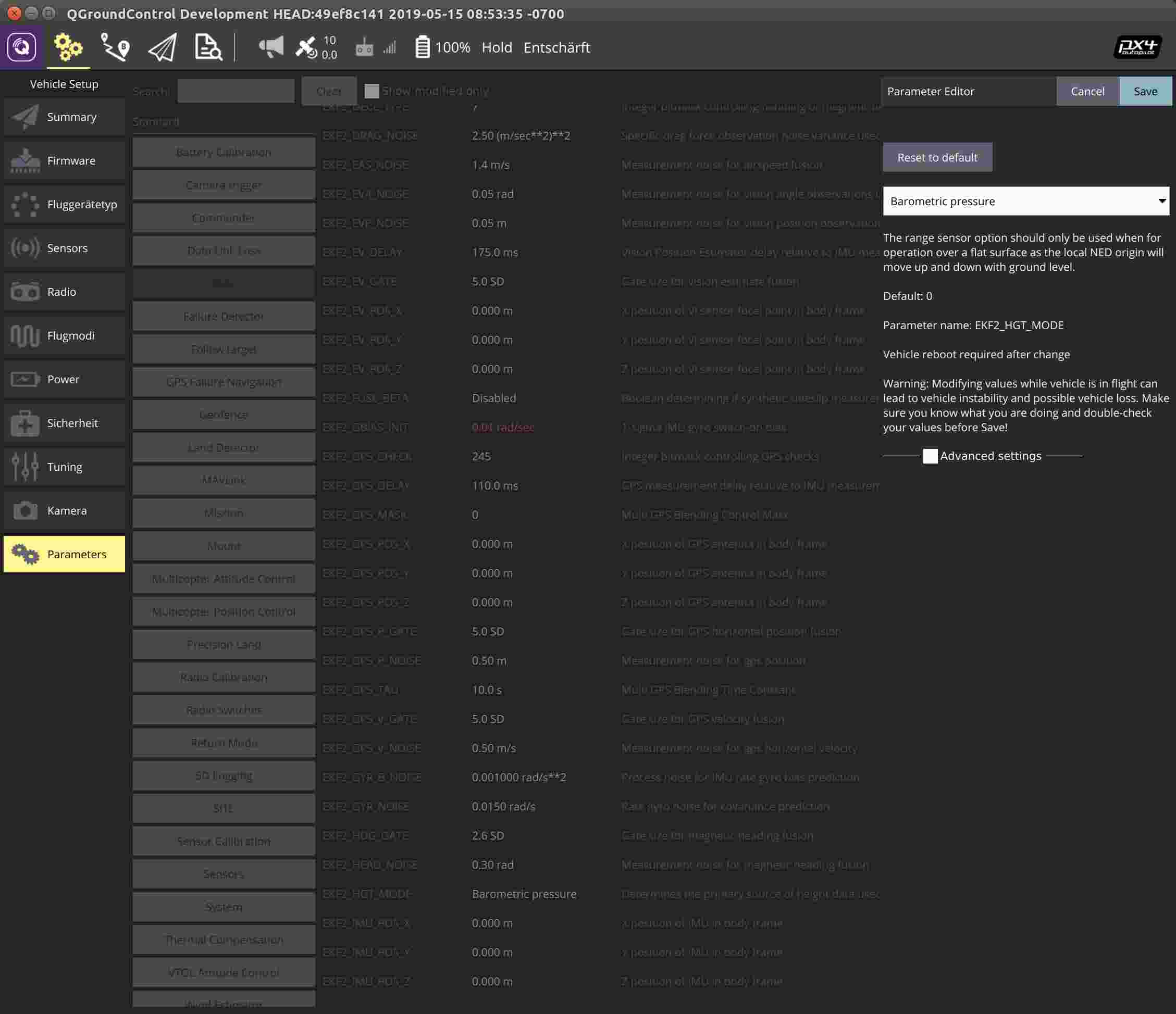
I added some quick screen shots (you find the parameter name on the right below the explanatory text).
Just look at all EKF2_GPS settings - maybe I missed something but if you disable the GPS for the EKF2 then it should be gone… But this means also no position control (which would be the case for your indoor system too)
Remove the checkbox for GPS (you may want to add something like a vision estimation here instead)
Check if height mode is set to baro (should be default) this will be your primary height source