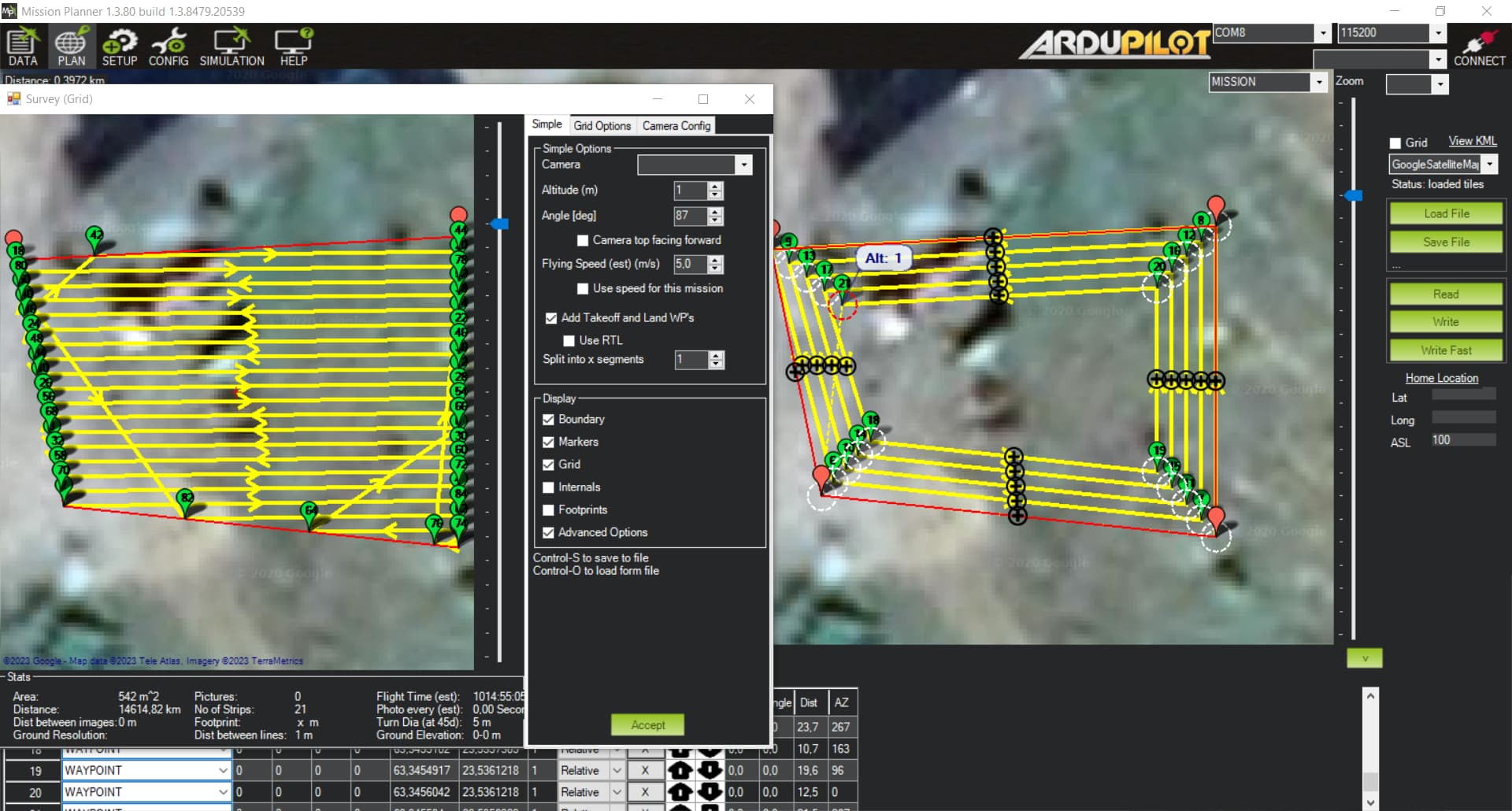
It would be very useful to get these automission plans from mission planner to qgroundcontrol. Optimal would be compine these that first it drive around the area and then start to drive every 3 lines for example.