Recently I had a strange crash which I couldn’t understand. I had a quad and it operate normal when I manually take off (manual mode) and then switch to position mode, the quad can hold its position well (with good GPS lock). Then I tried to use QGC to command the drone take off using the build in “take off” button, the quad take off and reach its take off altitude, then suddenly, the quad start drifting while drop altitude, in the end it smash into the ground.
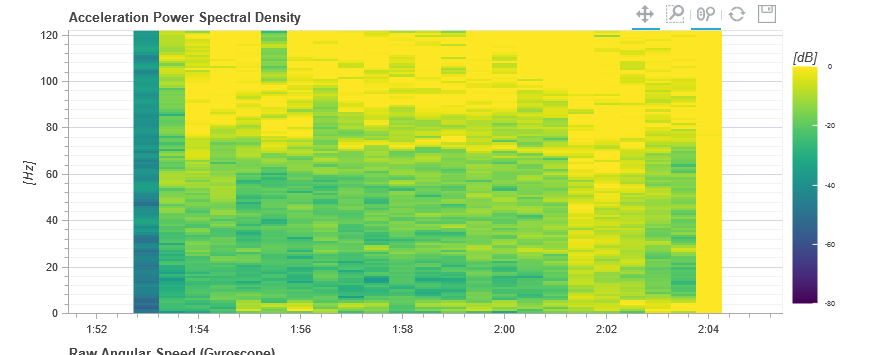
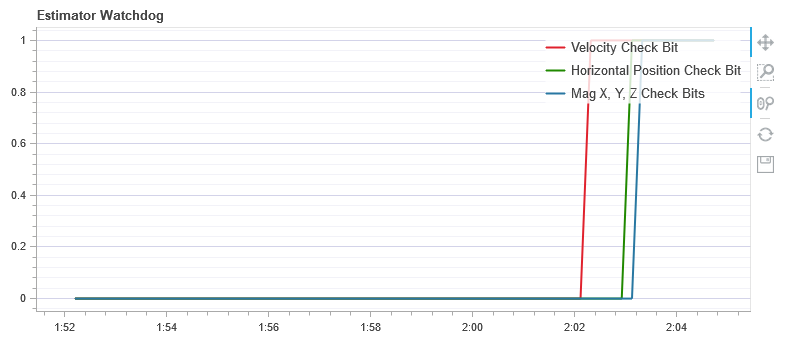
I don’t think you had a GPS failure. The GPS looks fine (up until the crash). It’s all the other sensors that seem very unhappy, maybe due to vibration? The way EKF2 works is that even though GPS might be totally fine, if the other sensors disagree wildly then EKF2 will not output a position solution.