
Hi, we’re Antilatency, and we’ve developed a tracking system. We started working on it in 2016, released it in 2019, and we’re proud to say that now over 1500 VR and Virtual Production customers in 60+ countries have their projects powered by Antilatency tracking. Recently we started working on an autonomous drone landing system, and we’re excited to show you our MVP. We call it CoPilot.
We used our positional tracker with Raspberry Pi connected to PX4 autopilot (pixhawk) via MAVLink protocol. Since our tracker together with Raspberry Pi weighs only 80 grams and requires 4.25 watts, it makes it perfect for this use case.
The tracker gets its position relative to an infrared layout on a landing pad, made with active IR markers. Markers make up a pattern complex enough for a tracker to not confuse it with other light sources and random reflections on the ground. Varying marker patterns also let the tracker recognize a specific landing pad out of multiple pads in the area.

Infrared markers are just a source of infrared light (850 nm) without any modulation or control from the drone. There are no radio receivers and antennas at the landing area, which makes the system not only robust and easy to set up, but also unaffected by radio interference.
The tracking system processes all the image data onboard, without recording or transmitting a real picture of the environment, which eliminates privacy issues. It’s a necessary feature for delivery drones.
In this demo, the drone is able to execute autonomous landing within 5 meters from the landing pad, and this distance grows with the power of markers.
So this is what we’ve been working on so far, and we’ve put our project up on GitHub. This is the CoPilot MVP code for Raspberry Pi. The app asks PX4 for FlightMode, and once the mode changes to ‘land’, it activates off-board mode and takes over to land the drone with precision. ‘FlightMode‘ changes to ‘land‘ after you send a corresponding command with ‘QGroundControl‘ during the flight, or from your RC with this command assigned to one of the switches. Go ahead and check out the CoPilot repository, dig deeper, and get involved.
We would love for developers to join us in driving this project further, and see you tune it to match your needs and expectations, so please join our Discord server where we will be sharing our progress going forward, answering your questions, and trying out new things together.
We’re also launching a developers program , and you can participate by telling us all about your drone projects, and how CoPilot may complement your work. We want to set the best projects up with our Dev Kits .
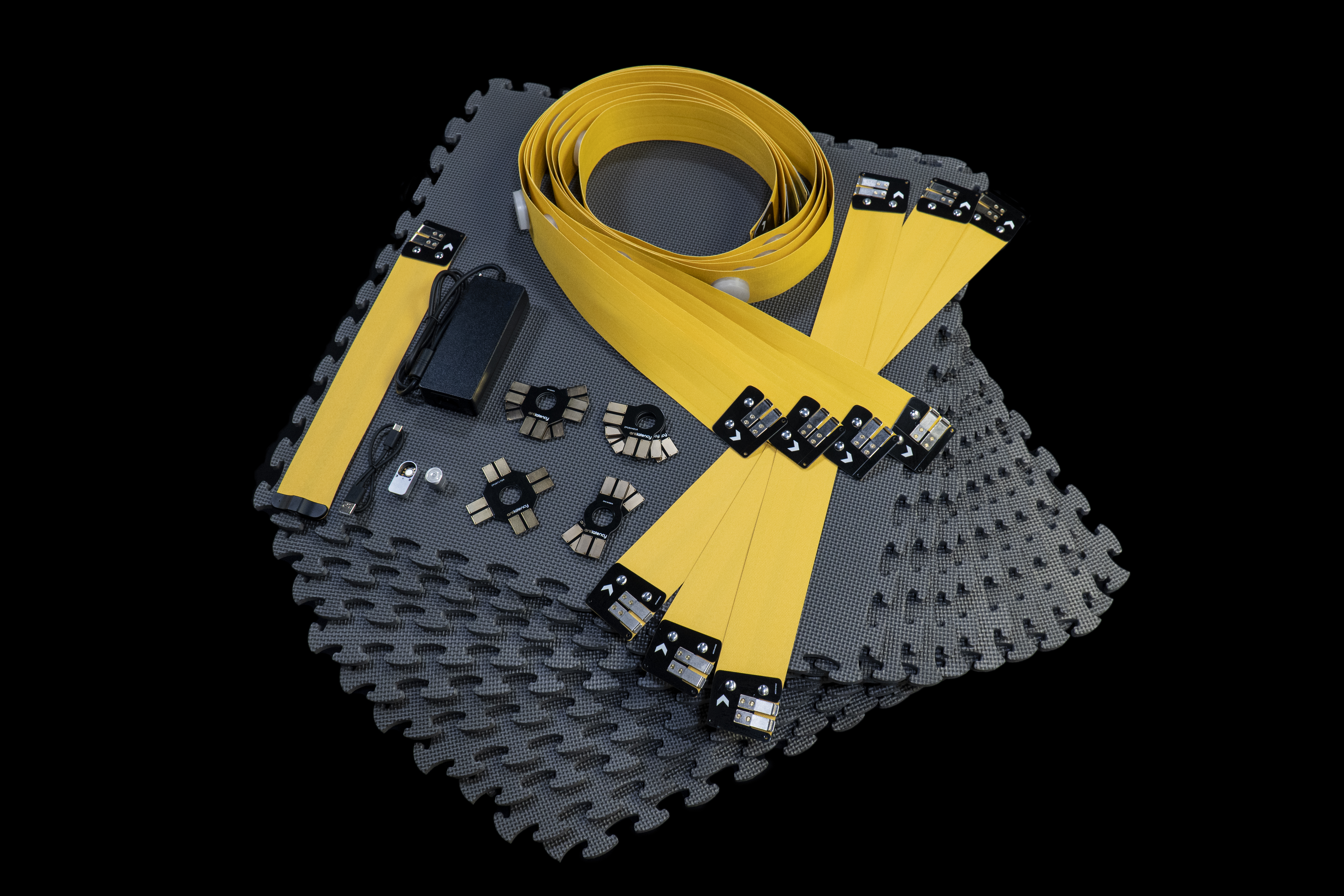
The kit includes: a 10 sqm tracking area, an Alt tracker, and a USB socket. Go ahead and check out #developers-program channel on CoPilot Discord for further instructions on how to get into our dev program.
We would appreciate it if you shared this post (or CoPilot website) with fellow developers that might be interested in getting their hands dirty with the project. We believe that precise auto drone landing will unlock new opportunities in multiple industries, and we welcome everyone who wants to tag along for the ride.
