Description
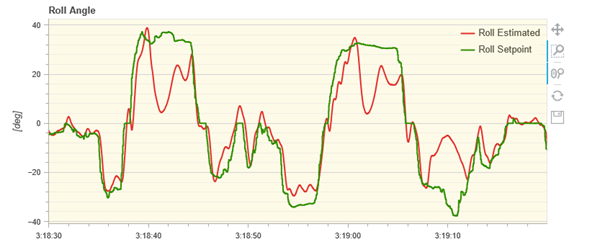
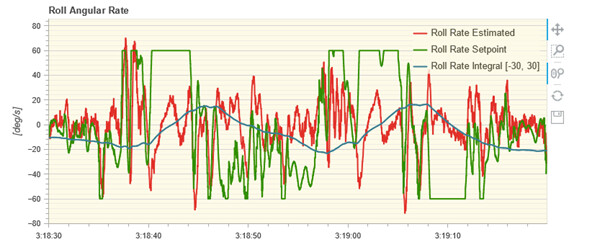
In Altitude mode, if you move the control stick from a neutral position to the side into a constant roll or pitch command and hold it there, the copter’s angle will initially increase, but quickly drop to almost level flight and increase again afterwards. The angular rate does not follow its setpoint well. Previously, an autotune with MC_AT_RISE_TIME = 0.3 seconds.
To Reproduce
Steps to reproduce the behavior:
- Perform and apply autotune with
MC_AT_RISE_TIME= 0.3 s - Hover in Altitude mode
- Input a roll angle and keep input constant
- Observe error
Expected behavior
The copter should increase its roll angle to the commanded one and keep this angle constant.
Log files and screenshots
Log file can be found here.

Drone
Hexacopter with a takeoff mass of over 10 kg, running on an Auterion Skynode.
We are using the “new” dynamic control allocation.