Hi, we’ve been having some issues with our altitude hold after switching to PX4 1.8.2. With 1.7.3, we had fantastic altitude hold on the same platform, but with 1.8.2, we see some oscillations, altitude dips and rises when stopping or flying fast, and slow drift of the altitude. This slow drift of altitude is also causing our land detector to fail because we’ll hit the ground and the altitude will still be drifting, so the z_deriv is outside of the bounds required for ground_contact in the land detector.
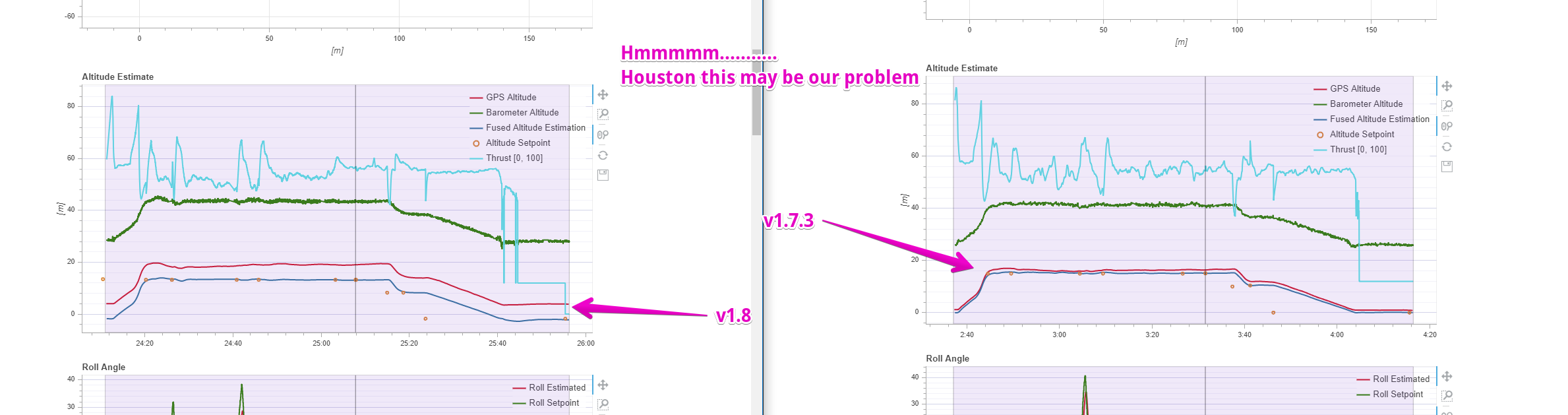
We ran two back to back flights (10 mins apart), one with 1.8.2 and one with 1.7.3. When we looked at the logs, we noticed something interesting. The fused altitude between GPS and baro is lower than both values for the 1.8.2 case. The 1.7.3 shows the fused altitude tracking the GPS altitude very tightly.
This is flown on an octorotor X platform, using a Pixhawk Cube 2.1, HERE2 GPS. Software versions are customized 1.8.2 and 1.7.3 firmware, modified to run our custom motor ESCs, among a few other changes (none that has anything to do with the height estimate or control).
Any idea what the source of the discrepancy between baro alt and GPS?
(logs to be provided shortly)
Thanks!