Hello @GilfoyleScofield, i was not visiting the forum for months so did not see your question.
I followed the link to add a camera at the bottom of Xacro file of the iris itself. Did not find “iris_fpv_cam_base.xacro”.
The link gives you a work around and u should be able to get the camera working and attached to iris copter.
The graph of nodes launched is shown below where you can see cameras launched as separate nodes but are attached to copter frame in iris.xacro file and you can use the topics published by camera for your application. Hope this helps.
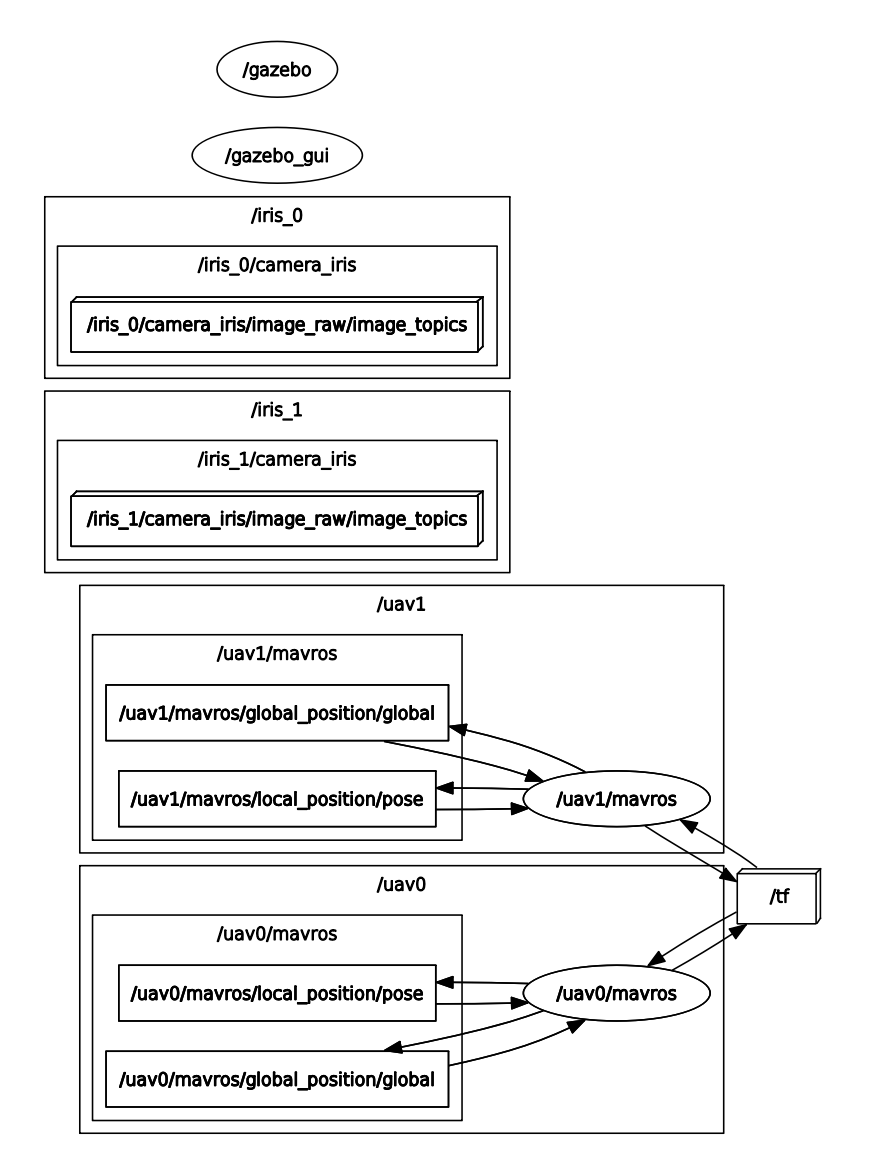
I have launched two iris drones so two cameras are there.