Hello, I am having troubles getting the px4flow board to send proper data to pixhawk 4 (I tested both the generic px4flow 1.3.1 from ebay and the CUAV px4flow 2.3).
- I do the calibration steps as per instructions and have a clearly focused image at 1m distance which I verify with QGC connected directly to the board over USB
- I connect the board over to pixhawk 4 i2c-2 port since I know there was an issue connecting to i2c-1
- I enable the px4flow by setting ekf2 aid mask = 2
- I check my px4flow driver through mavlink terminal and I see that packets are being sent and the i2c is correct and being recognized
- I have a lidarlite v3 connected to i2c-1 and I see that the distance topic is being populated with the correct distance measurement
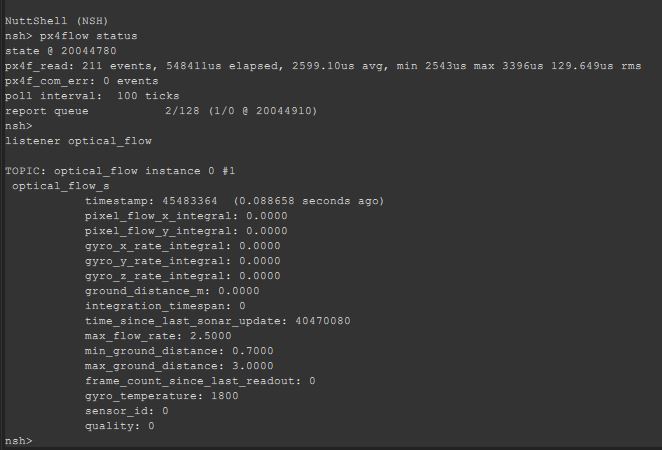
- I load up analyzer in QGC and see that the flow_rad topic is being populated, but here is the problem - it is being populate with all zeros! even the quality =0, now I know it needs to be above 200?
- the only non-zero value in the flow_rad topic is the timestamp
- I look at my vehicle local position topic, and I see that both velocity and position are being populated, but they are actually being populated with what looks like filtered accelerometer data, weird! if I changed the ekf2 aid mask to 0, the position/velocity stays the same so I know the ekf2 is not using any px4flow data when bit mask is 2.
any ideas? much appreciated!