
PX4 version : v1.14.0
When a motor fails, I would like to change the allocation matrix.
However, I am not sure which file to look at.
- While searching, I found something called a “mixer” and “control allocation.” What is the difference between these two?
- From what I understand, the mixer was used in versions prior to v1.14.0. So in versions after v1.14.0, can I just look at the control allocator file?
- Is the
src/lib/mixer_modulefile used for control allocation?
As a beginner, I still have a lot to learn…
If there is anything that might help me with fault-tolerant control, please teach me anything you can!
Lastly,
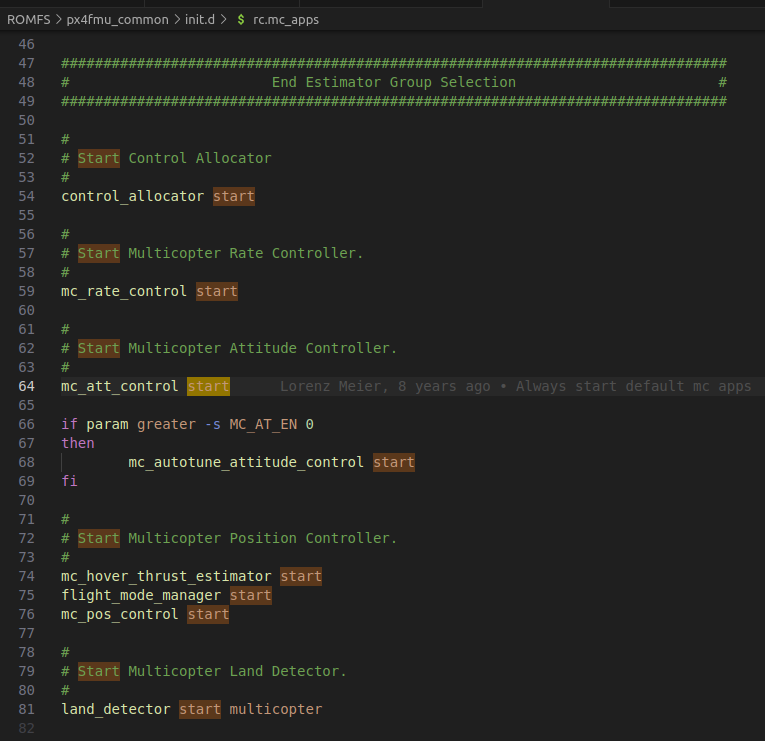
Lastly, I saw the following code in rc.mc_apps.
Does the command * start (e.g., control_allocator start, mc_rate_control start, mc_pos_control start) mean that the corresponding folders are used when controlling and performing control allocation?
Thank you.