PX4 development testing done by the Dronecode Test Team
Total Flights: 43
PR’s (Assigned / Tested): 7
VTOL: fix roll inversion #11382
Reintroduce slow down when landing manually #11540
EKF2: add usage to new exposed covariance #11092
mc_pos_control limit to 50 Hz #11639
Use ecl library version with recent bug fixes and enhancements. #11630
Modularize Attitude Control #11308
Trajectory generator-based FlightTasks - Handle position and velocity resets from EKF #11637
Issues reported: 0
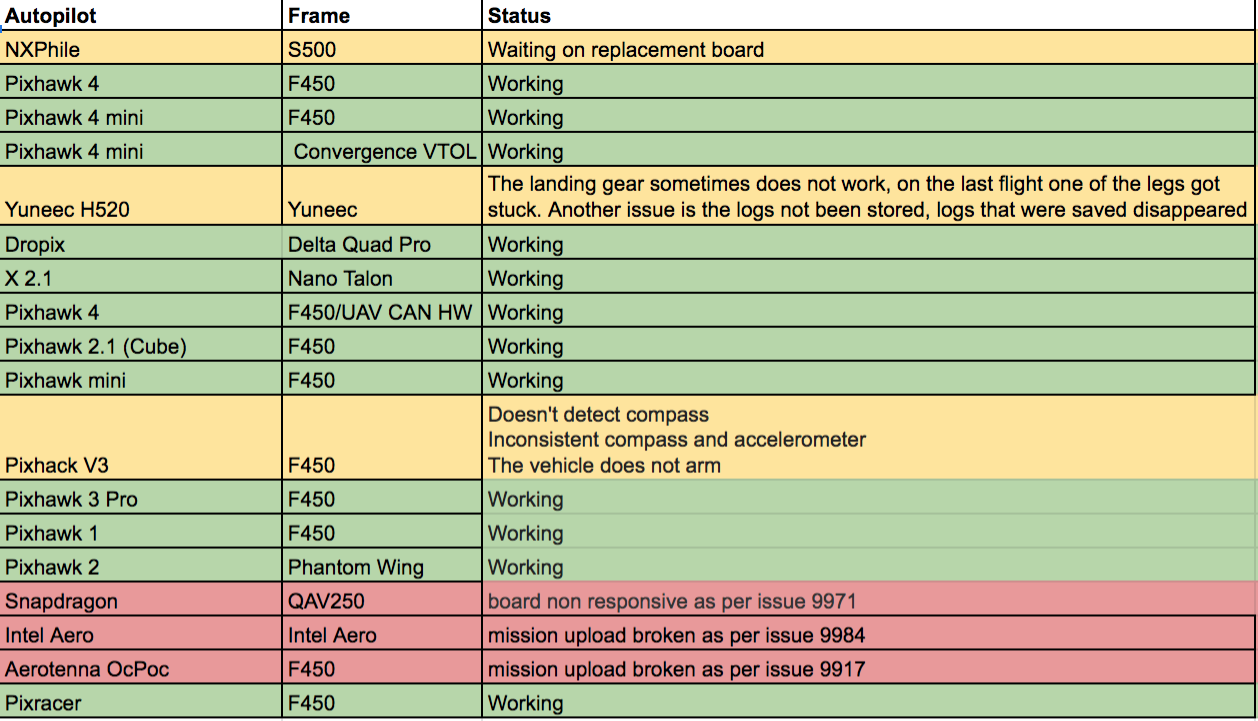
Vehicle Status