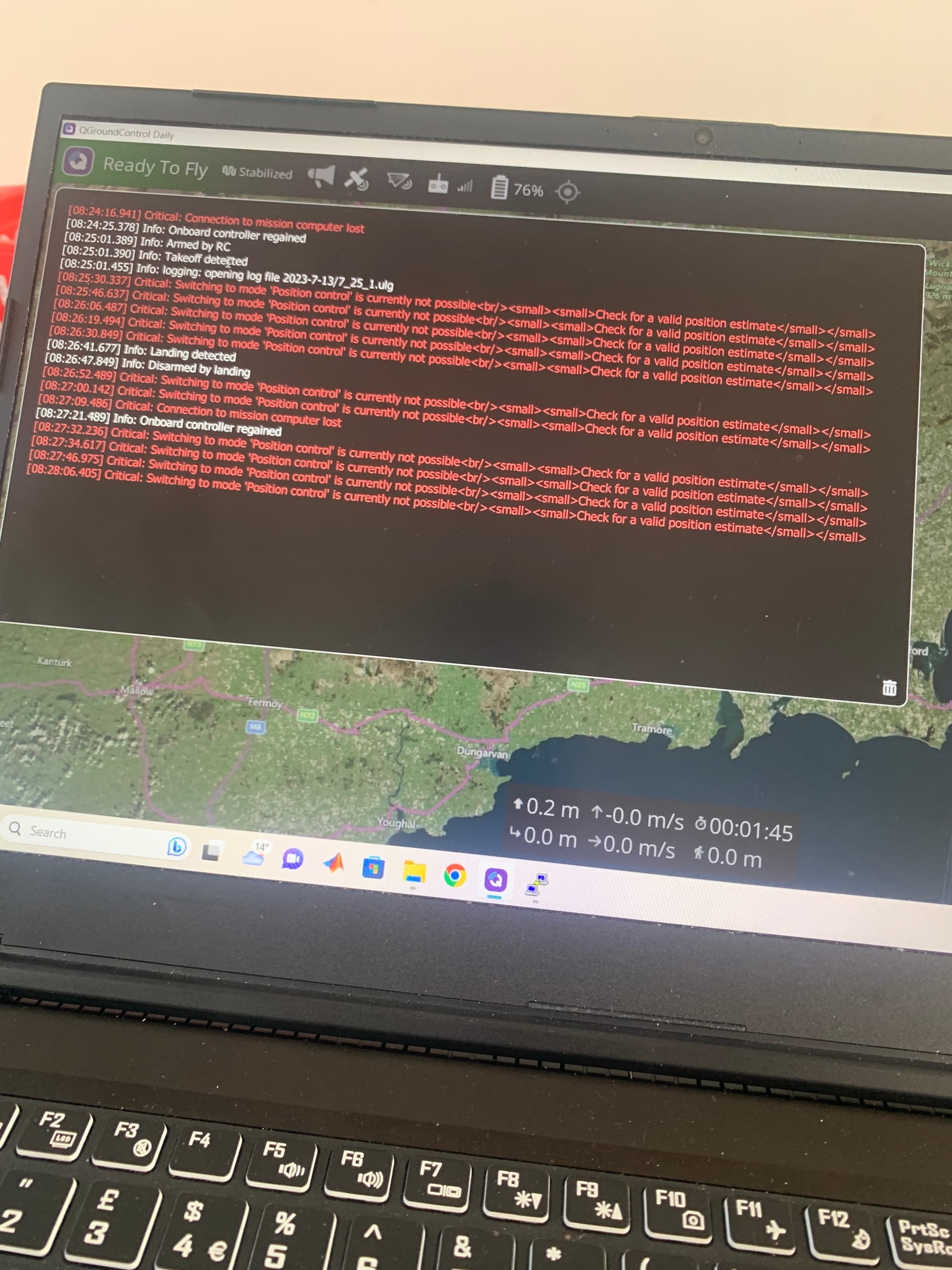
I have setup ROS with MAVROS to publish XYZ values and their corresponding velocities to a Pixhawk Cube Black. I can see these values in QGroundControl and the flight controller enters POSITION flight mode. However it is really unreliable, is always exiting POSITION flight mode (and not returning to it without a complete reset) and I constantly get errors like in the image provided. Does anyone have any advice on what might be wrong? I can provide the code that I am using.
1 Like
Hii have you been able to solve this problem i am facing similar issue?
please help
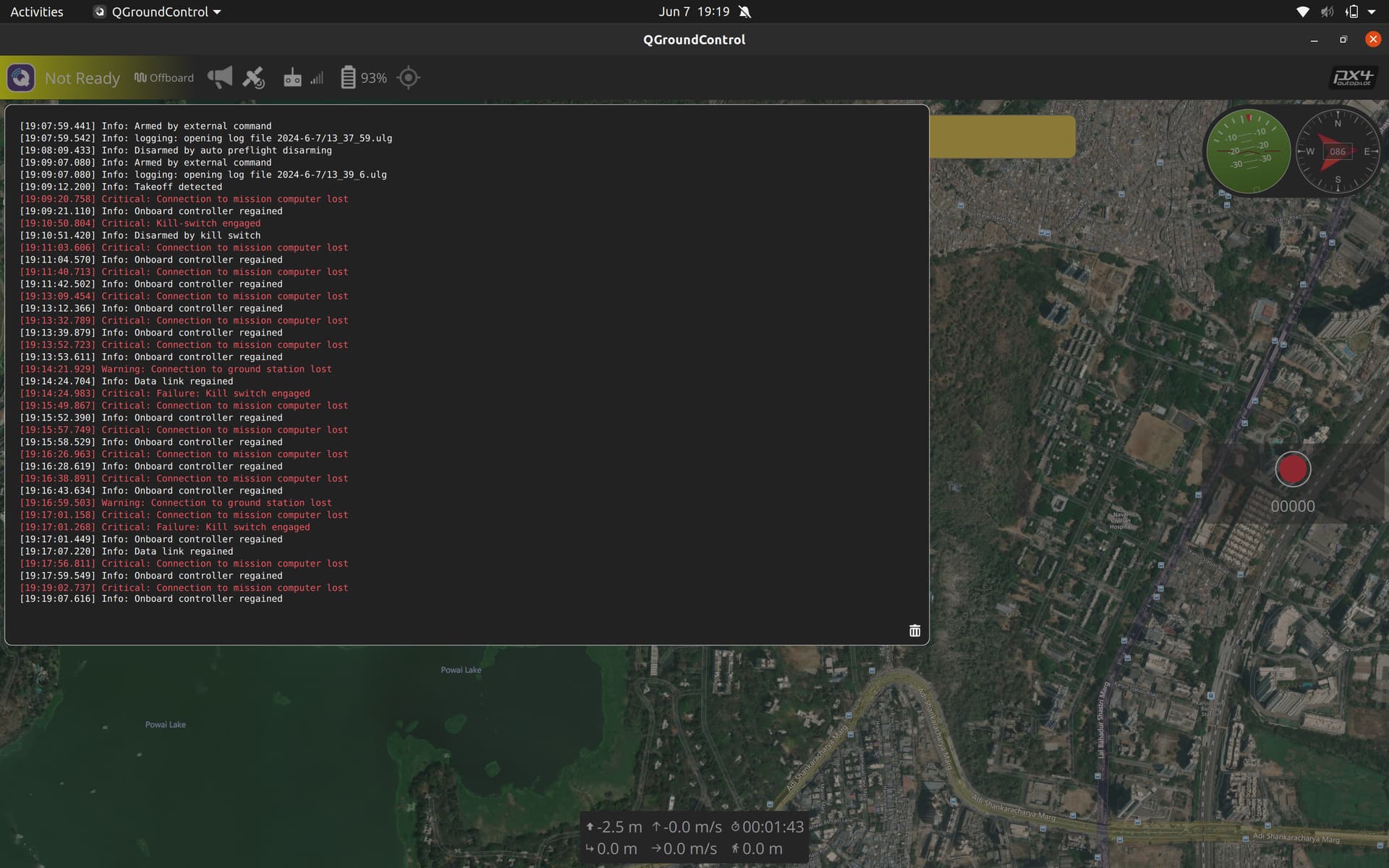
Hi, does your onboard computer keep connecting and disconnecting from the flight controller? What onboard computer and flight controller are you using? and what is it connected through, USB or Serial?
1 Like
i have Two xbee S2c one is on the drone connected to pixhawk and other is connected to Q ground control computer on which QGC is running and i am sending data via vicon based camera in indoor xbee is connected to ground control station via usb.