Hello everyone,
I am running HITL simulations using Gazebo and Pixhawk. The flight controller and Gazebo communicate over USB. It is a mentioned in the documentation that Gazebo/JMAVSim and the flight controller are connected over USB/UART. Does this mean that Gazebo and PX4 communicate using UART and UART communication is done over USB interface (like the UART interface in many microcontrollers)?
I’ve attached the diagram from the original documentation page with my question overlaid below.
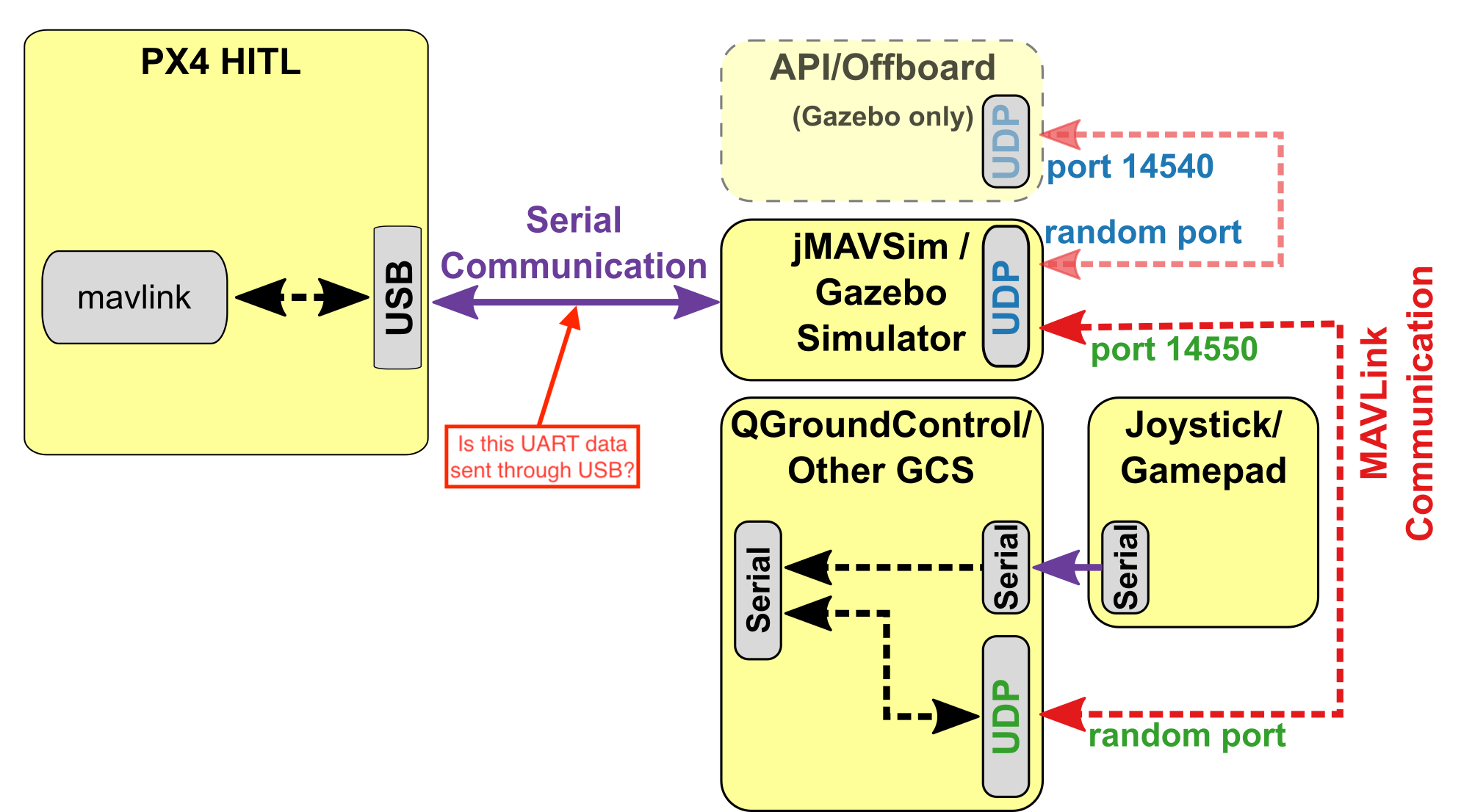
I am planning to introduce a microcontroller between PX4 and Gazebo to monitor this USB interface and display the data on a terminal. I wanted to know if it is indeed a UART over USB communication.
Thank you!