Hello.
I am developing a drone using PX4.
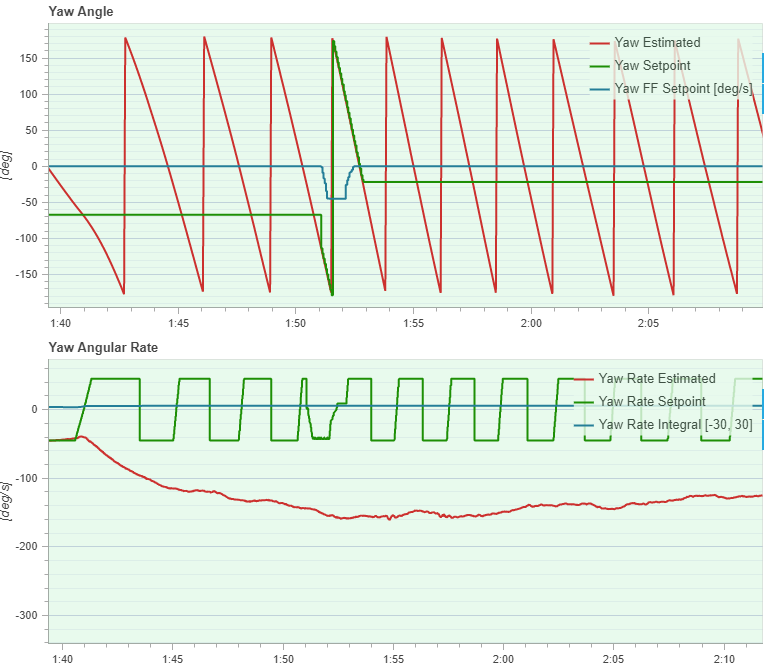
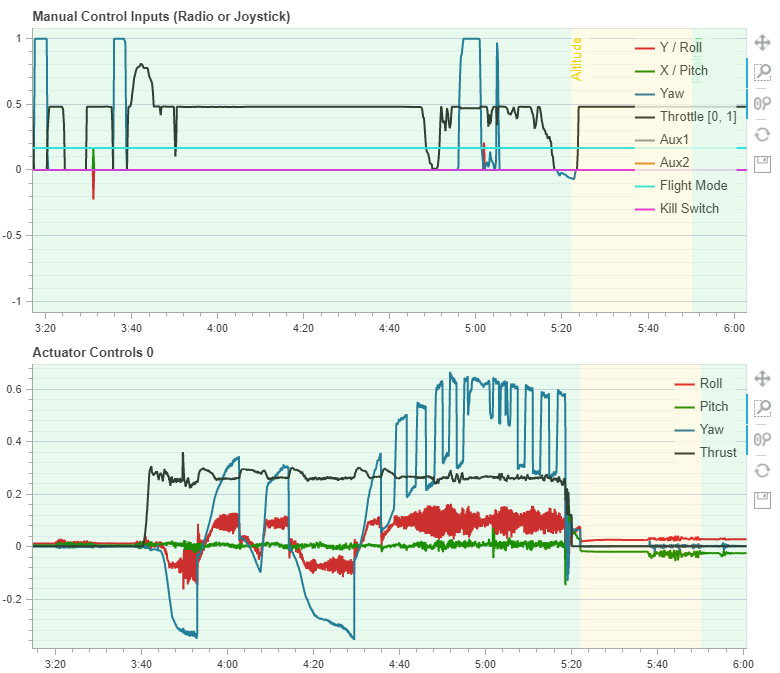
The other day, when I flew the drone, it kept yaw spinning constantly while hovering, and the stick operation did not work. (I did not operate anything during that time.)
I have looked at Log, but have not been able to figure out the cause.
If you have any knowledge about this, please let me know.
P.S.
Personally, I suspect that the gyroscope is faulty.
Configuration
Airframe: Octorotor X
FlightMode: Position
LogPicture: